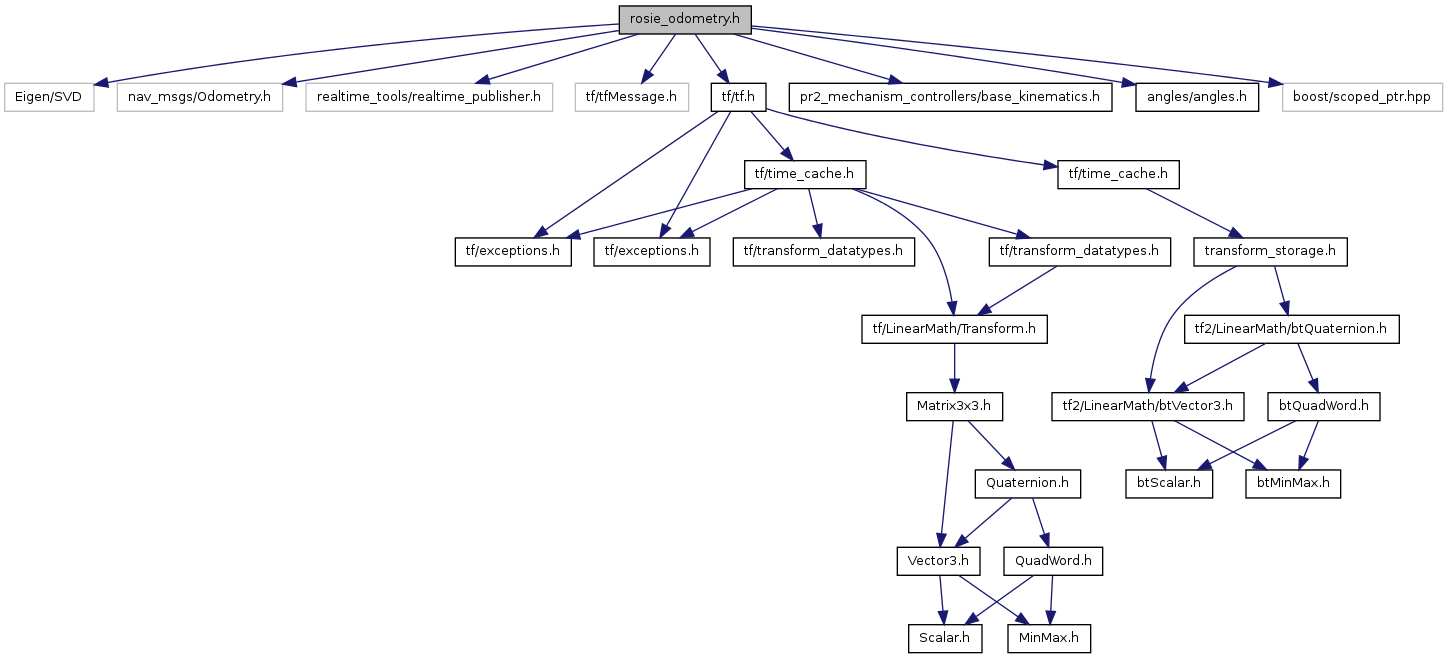
#include <Eigen/SVD>#include <nav_msgs/Odometry.h>#include <realtime_tools/realtime_publisher.h>#include <tf/tfMessage.h>#include <tf/tf.h>#include <pr2_mechanism_controllers/base_kinematics.h>#include <angles/angles.h>#include <boost/scoped_ptr.hpp>
Include dependency graph for rosie_odometry.h:
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | controller::RosieOdometry |
Namespaces | |
| namespace | controller |
Defines | |
| #define | EIGEN2_SUPPORT |
Typedefs | |
| typedef Eigen::Matrix< float, 16, 1 > | OdomMatrix16x1 |
| typedef Eigen::Matrix< float, 16, 16 > | OdomMatrix16x16 |
| typedef Eigen::Matrix< float, 16, 3 > | OdomMatrix16x3 |
| typedef Eigen::Matrix< float, 3, 1 > | OdomMatrix3x1 |
Define Documentation
| #define EIGEN2_SUPPORT |
This file is copied from pr2_mechanism_controllers.
Definition at line 39 of file rosie_odometry.h.
Typedef Documentation
| typedef Eigen::Matrix<float, 16, 1> OdomMatrix16x1 |
Definition at line 52 of file rosie_odometry.h.
| typedef Eigen::Matrix<float, 16, 16> OdomMatrix16x16 |
Definition at line 54 of file rosie_odometry.h.
| typedef Eigen::Matrix<float, 16, 3> OdomMatrix16x3 |
Definition at line 53 of file rosie_odometry.h.
| typedef Eigen::Matrix<float, 3, 1> OdomMatrix3x1 |
Definition at line 51 of file rosie_odometry.h.