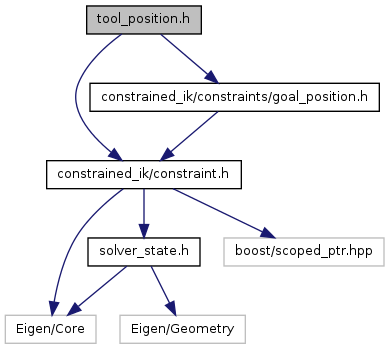
Include dependency graph for tool_position.h:
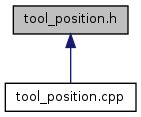
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | constrained_ik::constraints::ToolPosition |
| Constraint to specify cartesian goal position in tool frame (XYZ rotation) More... | |
Namespaces | |
| namespace | constrained_ik |
| namespace | constrained_ik::constraints |