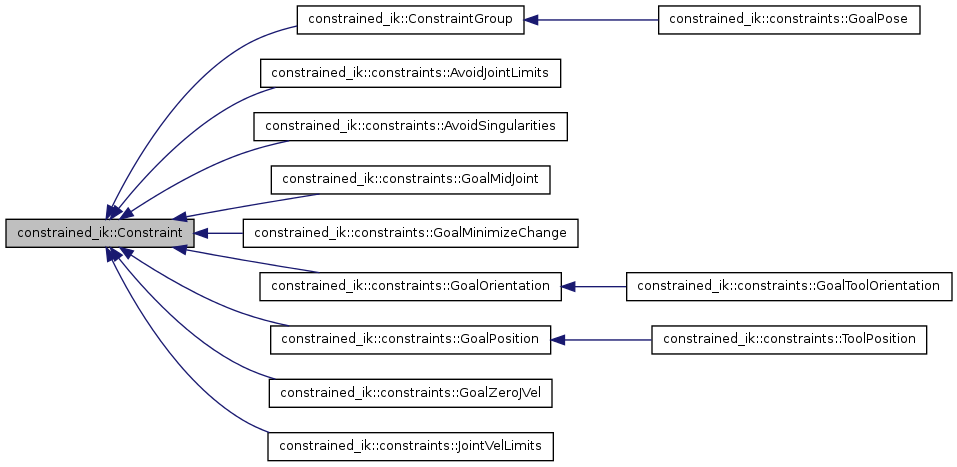
Base class for IK-solver Constraints. More...
#include <constraint.h>
Public Member Functions | |
| virtual Eigen::VectorXd | calcError ()=0 |
| virtual Eigen::MatrixXd | calcJacobian ()=0 |
| virtual bool | checkStatus () const |
| Constraint () | |
| virtual void | init (const Constrained_IK *ik) |
| virtual void | reset () |
| void | setDebug (bool debug=true) |
| set debug mode | |
| virtual void | update (const SolverState &state) |
| virtual void | updateError (Eigen::VectorXd &error) |
| virtual void | updateJacobian (Eigen::MatrixXd &jacobian) |
| virtual | ~Constraint () |
Static Public Member Functions | |
| static void | appendError (Eigen::VectorXd &error, const Eigen::VectorXd &addErr) |
| static void | appendJacobian (Eigen::MatrixXd &jacobian, const Eigen::MatrixXd &addJacobian) |
Protected Member Functions | |
| int | numJoints () |
Protected Attributes | |
| bool | debug_ |
| const Constrained_IK * | ik_ |
| bool | initialized_ |
| SolverState | state_ |
Detailed Description
Base class for IK-solver Constraints.
- specify relationship between joint velocities and constraint "error"
Definition at line 37 of file constraint.h.
Constructor & Destructor Documentation
| constrained_ik::Constraint::Constraint | ( | ) | [inline] |
Definition at line 40 of file constraint.h.
| virtual constrained_ik::Constraint::~Constraint | ( | ) | [inline, virtual] |
Definition at line 41 of file constraint.h.
Member Function Documentation
| void constrained_ik::Constraint::appendError | ( | Eigen::VectorXd & | error, |
| const Eigen::VectorXd & | addErr | ||
| ) | [static] |
Definition at line 29 of file constraint.cpp.
| void constrained_ik::Constraint::appendJacobian | ( | Eigen::MatrixXd & | jacobian, |
| const Eigen::MatrixXd & | addJacobian | ||
| ) | [static] |
Definition at line 44 of file constraint.cpp.
| virtual Eigen::VectorXd constrained_ik::Constraint::calcError | ( | ) | [pure virtual] |
Implemented in constrained_ik::constraints::GoalPosition, constrained_ik::constraints::AvoidJointLimits, constrained_ik::constraints::JointVelLimits, constrained_ik::constraints::GoalToolOrientation, constrained_ik::constraints::ToolPosition, constrained_ik::constraints::GoalOrientation, constrained_ik::constraints::AvoidSingularities, constrained_ik::constraints::GoalMidJoint, constrained_ik::constraints::GoalMinimizeChange, constrained_ik::constraints::GoalZeroJVel, and constrained_ik::ConstraintGroup.
| virtual Eigen::MatrixXd constrained_ik::Constraint::calcJacobian | ( | ) | [pure virtual] |
Implemented in constrained_ik::constraints::AvoidJointLimits, constrained_ik::constraints::GoalPosition, constrained_ik::constraints::JointVelLimits, constrained_ik::constraints::GoalToolOrientation, constrained_ik::constraints::ToolPosition, constrained_ik::constraints::GoalOrientation, constrained_ik::constraints::AvoidSingularities, constrained_ik::constraints::GoalMidJoint, constrained_ik::constraints::GoalMinimizeChange, constrained_ik::constraints::GoalZeroJVel, and constrained_ik::ConstraintGroup.
| virtual bool constrained_ik::Constraint::checkStatus | ( | ) | const [inline, virtual] |
Reimplemented in constrained_ik::constraints::GoalOrientation, constrained_ik::constraints::GoalPosition, constrained_ik::constraints::AvoidJointLimits, constrained_ik::constraints::JointVelLimits, constrained_ik::constraints::AvoidSingularities, constrained_ik::constraints::GoalMidJoint, constrained_ik::constraints::GoalMinimizeChange, constrained_ik::constraints::GoalZeroJVel, and constrained_ik::ConstraintGroup.
Definition at line 51 of file constraint.h.
| virtual void constrained_ik::Constraint::init | ( | const Constrained_IK * | ik | ) | [inline, virtual] |
Reimplemented in constrained_ik::constraints::AvoidJointLimits, constrained_ik::constraints::JointVelLimits, constrained_ik::constraints::GoalMidJoint, and constrained_ik::ConstraintGroup.
Definition at line 53 of file constraint.h.
| int constrained_ik::Constraint::numJoints | ( | ) | [protected] |
Definition at line 59 of file constraint.cpp.
| virtual void constrained_ik::Constraint::reset | ( | ) | [inline, virtual] |
Reimplemented in constrained_ik::constraints::GoalOrientation, constrained_ik::constraints::AvoidJointLimits, constrained_ik::constraints::GoalPosition, constrained_ik::constraints::JointVelLimits, and constrained_ik::ConstraintGroup.
Definition at line 55 of file constraint.h.
| void constrained_ik::Constraint::setDebug | ( | bool | debug = true | ) | [inline] |
set debug mode
- Parameters:
-
debug Value to set debug_ to (defaults to true)
Definition at line 60 of file constraint.h.
| virtual void constrained_ik::Constraint::update | ( | const SolverState & | state | ) | [inline, virtual] |
Reimplemented in constrained_ik::constraints::GoalOrientation, constrained_ik::constraints::AvoidJointLimits, constrained_ik::constraints::GoalPosition, constrained_ik::constraints::JointVelLimits, constrained_ik::constraints::AvoidSingularities, and constrained_ik::ConstraintGroup.
Definition at line 62 of file constraint.h.
| void constrained_ik::Constraint::updateError | ( | Eigen::VectorXd & | error | ) | [virtual] |
Definition at line 64 of file constraint.cpp.
| void constrained_ik::Constraint::updateJacobian | ( | Eigen::MatrixXd & | jacobian | ) | [virtual] |
Definition at line 69 of file constraint.cpp.
Member Data Documentation
bool constrained_ik::Constraint::debug_ [protected] |
Definition at line 72 of file constraint.h.
const Constrained_IK* constrained_ik::Constraint::ik_ [protected] |
Definition at line 73 of file constraint.h.
bool constrained_ik::Constraint::initialized_ [protected] |
Definition at line 71 of file constraint.h.
SolverState constrained_ik::Constraint::state_ [protected] |
Definition at line 74 of file constraint.h.
The documentation for this class was generated from the following files: