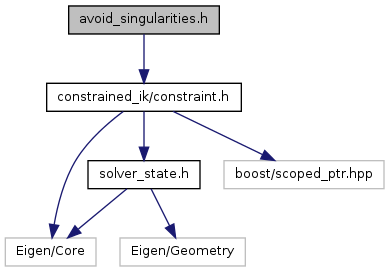
#include "constrained_ik/constraint.h"
Include dependency graph for avoid_singularities.h:
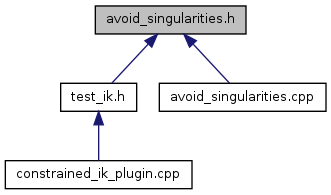
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | constrained_ik::constraints::AvoidSingularities |
| Constraint that increases dexterity when manipulator is close to singularity Joint velocity is determined by gradient of smallest singular value Constraint is only active when smallest SV is below theshold. More... | |
Namespaces | |
| namespace | constrained_ik |
| namespace | constrained_ik::constraints |