#include <vector>#include <cstdio>#include "Reading.h"#include <boost/thread.hpp>#include <boost/bind.hpp>#include <boost/thread/condition.hpp>#include <ros/ros.h>#include <sensor_msgs/CameraInfo.h>
Include dependency graph for Sensor.h:

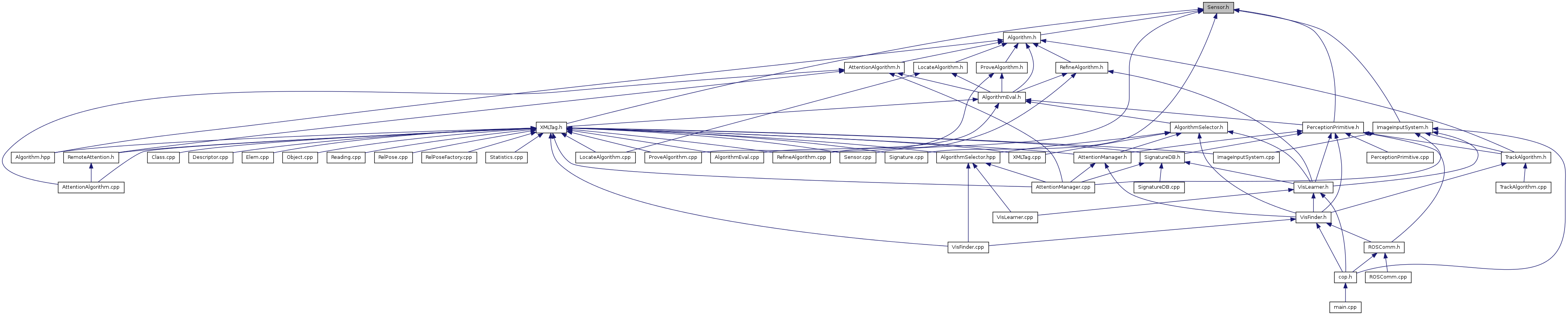
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | cop::MinimalCalibration |
| class | cop::ScopedImage< TypeReading, DataType > |
| class | cop::Sensor |
| Provides an interface for camera usage. More... | |
| class | cop::SensorNetworkRelay< SensorType, MessageType > |
Namespaces | |
| namespace | cop |
all functionality of the project cognitive perception is in the cop namespace Have a closer look to the interfaces that are provided by cognitive_perception: | |
Defines | |
| #define | XML_ATTRIBUTE_MESSAGTYPE "MessageType" |
| #define | XML_ATTRIBUTE_RATE "Rate" |
| #define | XML_ATTRIBUTE_SENSORTYPE "SensorType" |
| #define | XML_ATTRIBUTE_TOPICNAME "TopicName" |
| #define | XML_NODE_SENSOR "Sensor" |
| #define | XML_NODE_SENSORRELAY "SensorRelay" |
| #define | XML_PROPERTY_SENSORNAME "SensorName" |
Define Documentation
| #define XML_ATTRIBUTE_MESSAGTYPE "MessageType" |
| #define XML_ATTRIBUTE_RATE "Rate" |
| #define XML_ATTRIBUTE_SENSORTYPE "SensorType" |
| #define XML_ATTRIBUTE_TOPICNAME "TopicName" |
| #define XML_NODE_SENSOR "Sensor" |
| #define XML_NODE_SENSORRELAY "SensorRelay" |
| #define XML_PROPERTY_SENSORNAME "SensorName" |