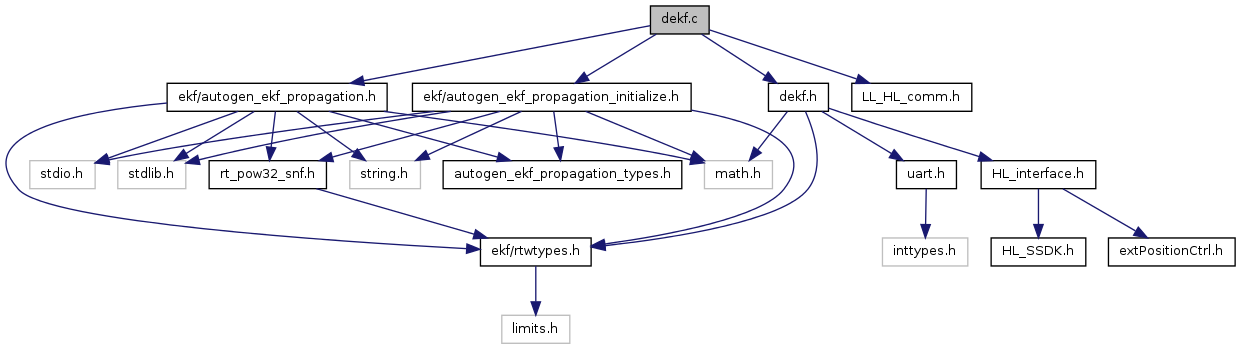
#include "dekf.h"#include "LL_HL_comm.h"#include <ekf/autogen_ekf_propagation.h>#include <ekf/autogen_ekf_propagation_initialize.h>
Include dependency graph for dekf.c:
Go to the source code of this file.
Functions | |
| void | correctState (DekfContext *self) |
| char | DEKF_getInitializeEvent (DekfContext *self) |
| void | DEKF_init (DekfContext *self, HLI_EXT_POSITION *pos_ctrl_input) |
| void | DEKF_sendState (DekfContext *self, int64_t timestamp) |
| void | DEKF_step (DekfContext *self, int64_t timestamp) |
| int | float2Int (float x) |
| convert float to int with correct rounding | |
| short | float2Short (float x) |
| convert float to short with correct rounding | |
| void | initState (DekfContext *self) |
| void | quaternionMultiplication (const real32_T q1[4], const real32_T q2[4], real32_T q[4]) |
| void | writeControllerOutput (DekfContext *self) |
| real32_T | yawFromQuaternion (const real32_T q[4]) |
Variables | |
| const real32_T | DEKF_ASCTEC_ACC_TO_SI = 9.81e-3 |
| const real32_T | DEKF_ASCTEC_OMEGA_TO_SI = 0.015 * M_PI / 180.0 |
Function Documentation
| void correctState | ( | DekfContext * | self | ) | [inline] |
| char DEKF_getInitializeEvent | ( | DekfContext * | self | ) |
| void DEKF_init | ( | DekfContext * | self, |
| HLI_EXT_POSITION * | pos_ctrl_input | ||
| ) |
| void DEKF_sendState | ( | DekfContext * | self, |
| int64_t | timestamp | ||
| ) |
| void DEKF_step | ( | DekfContext * | self, |
| int64_t | timestamp | ||
| ) |
| int float2Int | ( | float | x | ) | [inline] |
| short float2Short | ( | float | x | ) | [inline] |
| void initState | ( | DekfContext * | self | ) | [inline] |
| void quaternionMultiplication | ( | const real32_T | q1[4], |
| const real32_T | q2[4], | ||
| real32_T | q[4] | ||
| ) | [inline] |
| void writeControllerOutput | ( | DekfContext * | self | ) | [inline] |
| real32_T yawFromQuaternion | ( | const real32_T | q[4] | ) | [inline] |
Variable Documentation
| const real32_T DEKF_ASCTEC_ACC_TO_SI = 9.81e-3 |
| const real32_T DEKF_ASCTEC_OMEGA_TO_SI = 0.015 * M_PI / 180.0 |