#include <iostream>#include <boost/thread/thread.hpp>#include <boost/date_time.hpp>#include <boost/thread/locks.hpp>#include "ros/ros.h"#include "ros/service.h"#include "ros/service_server.h"#include "sensor_msgs/JointState.h"#include "std_msgs/String.h"#include <stdio.h>#include <string>#include "controlAllegroHand.h"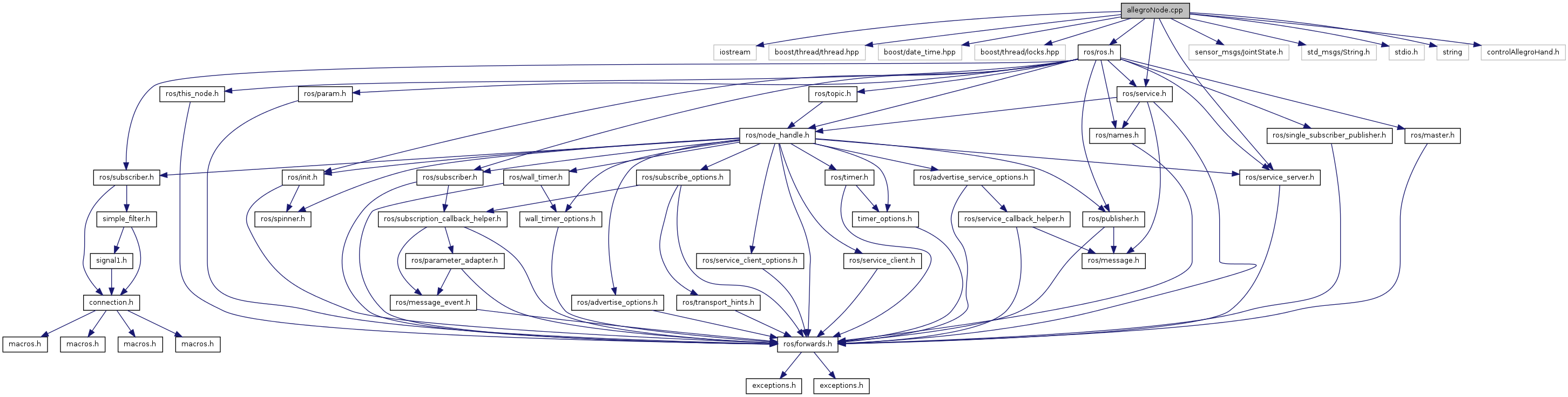
Go to the source code of this file.
Define Documentation
| #define EXT_CMD_TOPIC "/allegroHand/external_cmd" |
Definition at line 41 of file allegroNode.cpp.
| #define JOINT_CMD_TOPIC "/allegroHand/joint_cmd" |
Definition at line 40 of file allegroNode.cpp.
| #define JOINT_CURRENT_TOPIC "/allegroHand/joint_current_states" |
Definition at line 44 of file allegroNode.cpp.
| #define JOINT_DESIRED_TOPIC "/allegroHand/joint_desired_states" |
Definition at line 43 of file allegroNode.cpp.
| #define JOINT_STATE_TOPIC "/allegroHand/joint_states" |
Definition at line 39 of file allegroNode.cpp.
Function Documentation
| void extCmdCallback | ( | const std_msgs::String::ConstPtr & | msg | ) |
Definition at line 105 of file allegroNode.cpp.
| int main | ( | int | argc, |
| char ** | argv | ||
| ) |
Definition at line 203 of file allegroNode.cpp.
| void SetjointCallback | ( | const sensor_msgs::JointState & | msg | ) |
Definition at line 97 of file allegroNode.cpp.
| void timerCallback | ( | const ros::TimerEvent & | event | ) |
Definition at line 123 of file allegroNode.cpp.
Variable Documentation
| controlAllegroHand* canDevice |
Definition at line 92 of file allegroNode.cpp.
| double current_position[DOF_JOINTS] = {0.0} |
Definition at line 48 of file allegroNode.cpp.
| double current_position_filtered[DOF_JOINTS] = {0.0} |
Definition at line 50 of file allegroNode.cpp.
| double current_velocity[DOF_JOINTS] = {0.0} |
Definition at line 54 of file allegroNode.cpp.
| double current_velocity_filtered[DOF_JOINTS] = {0.0} |
Definition at line 56 of file allegroNode.cpp.
| double desired_position[DOF_JOINTS] = {0.0} |
Definition at line 47 of file allegroNode.cpp.
| double desired_torque[DOF_JOINTS] = {0.0} |
Definition at line 58 of file allegroNode.cpp.
| double desired_velocity[DOF_JOINTS] = {0.0} |
Definition at line 53 of file allegroNode.cpp.
| double dt |
Definition at line 89 of file allegroNode.cpp.
| std::string ext_cmd |
Definition at line 83 of file allegroNode.cpp.
Definition at line 79 of file allegroNode.cpp.
| int frame = 0 |
Definition at line 66 of file allegroNode.cpp.
Definition at line 78 of file allegroNode.cpp.
Definition at line 76 of file allegroNode.cpp.
Definition at line 75 of file allegroNode.cpp.
Definition at line 74 of file allegroNode.cpp.
| std::string jointNames[DOF_JOINTS] |
{ "joint_0.0", "joint_1.0", "joint_2.0", "joint_3.0" ,
"joint_4.0", "joint_5.0", "joint_6.0", "joint_7.0" ,
"joint_8.0", "joint_9.0", "joint_10.0", "joint_11.0",
"joint_12.0", "joint_13.0", "joint_14.0", "joint_15.0" }
Definition at line 61 of file allegroNode.cpp.
| int lEmergencyStop = 0 |
Definition at line 69 of file allegroNode.cpp.
| sensor_msgs::JointState msgJoint |
Definition at line 82 of file allegroNode.cpp.
| sensor_msgs::JointState msgJoint_current |
Definition at line 81 of file allegroNode.cpp.
| sensor_msgs::JointState msgJoint_desired |
Definition at line 80 of file allegroNode.cpp.
Definition at line 71 of file allegroNode.cpp.
| double previous_position[DOF_JOINTS] = {0.0} |
Definition at line 49 of file allegroNode.cpp.
| double previous_position_filtered[DOF_JOINTS] = {0.0} |
Definition at line 51 of file allegroNode.cpp.
| double previous_velocity[DOF_JOINTS] = {0.0} |
Definition at line 55 of file allegroNode.cpp.
| double secs |
Definition at line 88 of file allegroNode.cpp.
Definition at line 87 of file allegroNode.cpp.
Definition at line 86 of file allegroNode.cpp.