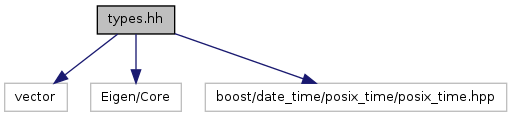
#include <vector>#include <Eigen/Core>#include <boost/date_time/posix_time/posix_time.hpp>
Include dependency graph for types.hh:
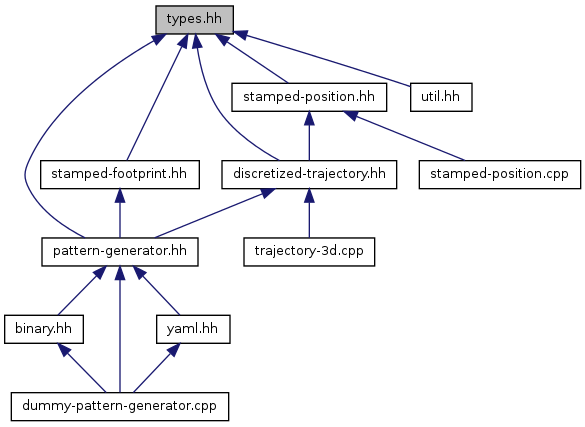
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Namespaces | |
| namespace | walk |
Defines | |
| #define | WALK_INTERFACES_EIGEN_STL_VECTOR(T) std::vector<T, Eigen::aligned_allocator<std::pair<const int, T> > > |
| Define a vector of elements containing Eigen objects. | |
Typedefs | |
| typedef Eigen::Matrix< double, 3, 1 > | walk::Footprint2d |
| 2D footprint. | |
| typedef Eigen::Matrix< double, 3, 3 > | walk::HomogeneousMatrix2d |
| 2D homogeneous matrix. | |
| typedef Eigen::Matrix< double, 4, 4 > | walk::HomogeneousMatrix3d |
| 3D homogeneous matrix. | |
| typedef Eigen::VectorXd | walk::Posture |
| Posture (Eigen vector). | |
| typedef boost::posix_time::ptime | walk::Time |
| Time. | |
| typedef boost::posix_time::time_duration | walk::TimeDuration |
| Duration. | |
| typedef Eigen::Vector2d | walk::Vector2d |
| 2D vector. | |
| typedef Eigen::Vector3d | walk::Vector3d |
| 3D vector. | |
Functions | |
| typedef | walk::WALK_INTERFACES_EIGEN_STL_VECTOR (Footprint2d) Footprint2dSequence |
| Vector of 2d footprints. | |
Define Documentation
| #define WALK_INTERFACES_EIGEN_STL_VECTOR | ( | T | ) | std::vector<T, Eigen::aligned_allocator<std::pair<const int, T> > > |
Define a vector of elements containing Eigen objects.
The STL containers containing Eigen matrices must use a specific allocator. This macro wraps the type definition.
It is not possible to use a typedef in this case as templated typedef are not supported in C++03 (unlike C++11).