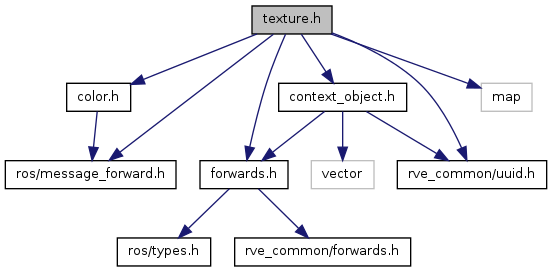
#include "forwards.h"#include "color.h"#include "context_object.h"#include <rve_common/uuid.h>#include <ros/message_forward.h>#include <map>
Include dependency graph for texture.h:
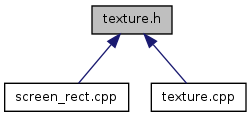
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| struct | rve_render_client::Texture::ContextInfo |
| class | rve_render_client::Texture |
Namespaces | |
| namespace | rve_render_client |
| namespace | sensor_msgs |
Functions | |
| TexturePtr | rve_render_client::createTexture (ClientContext *context, uint32_t num_mips=0) |
| TexturePtr | rve_render_client::createTexture (uint32_t num_mips=0) |
| TexturePtr | rve_render_client::getTexture (const rve_common::UUID &id) |
| TexturePtr | rve_render_client::loadTexture (ClientContext *context, const std::string &resource_path, uint32_t num_mips=0) |
| TexturePtr | rve_render_client::loadTexture (const std::string &resource_path, uint32_t num_mips=0) |
| sensor_msgs::ROS_DECLARE_MESSAGE (Image) | |