#include "gicp-fallback.h"#include <fstream>#include <sstream>#include <iostream>#include <pcl/filters/voxel_grid.h>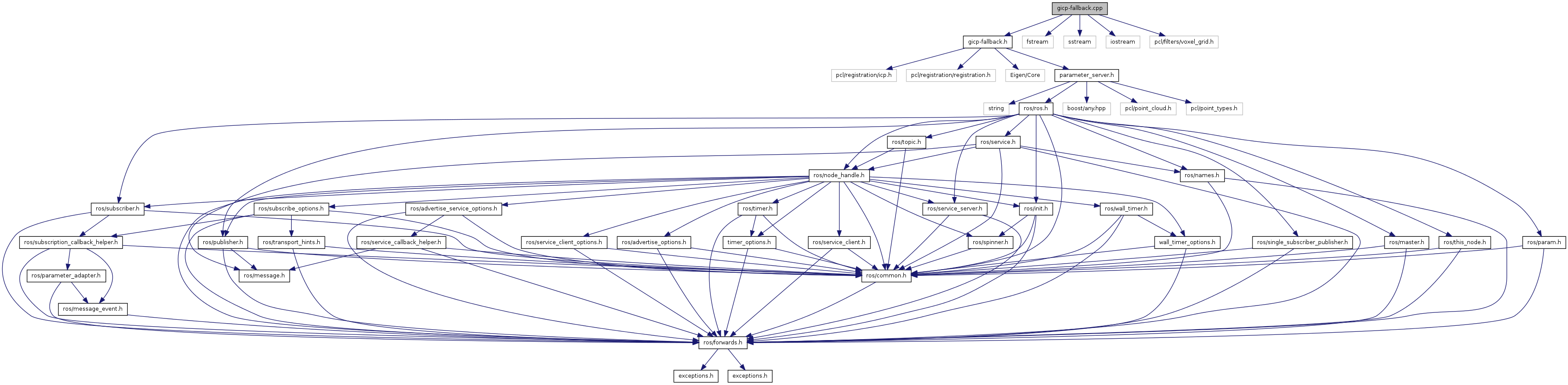
Go to the source code of this file.
Functions | |
| void | downSample (const pointcloud_type &src, pointcloud_type &to) |
| bool | gicpfallback (const pointcloud_type &from, const pointcloud_type &to, Eigen::Matrix4f &transform) |
| void | saveCloud (const char *filename, const pointcloud_type &pc, const int max_cnt, const bool color) |
| void downSample | ( | const pointcloud_type & | src, |
| pointcloud_type & | to | ||
| ) |
Definition at line 83 of file gicp-fallback.cpp.
| bool gicpfallback | ( | const pointcloud_type & | from, |
| const pointcloud_type & | to, | ||
| Eigen::Matrix4f & | transform | ||
| ) |
Definition at line 94 of file gicp-fallback.cpp.
| void saveCloud | ( | const char * | filename, |
| const pointcloud_type & | pc, | ||
| const int | max_cnt, | ||
| const bool | color | ||
| ) |
Definition at line 33 of file gicp-fallback.cpp.

