#include "rgbd_registration/pcl_utils.h"#include "rgbd_registration/parameter_server.h"#include <pcl/io/pcd_io.h>#include <pcl/point_types.h>#include <pcl/features/normal_3d_omp.h>#include <pcl/features/normal_3d.h>#include <pcl/filters/filter.h>#include <pcl/common/transforms.h>#include <ros/console.h>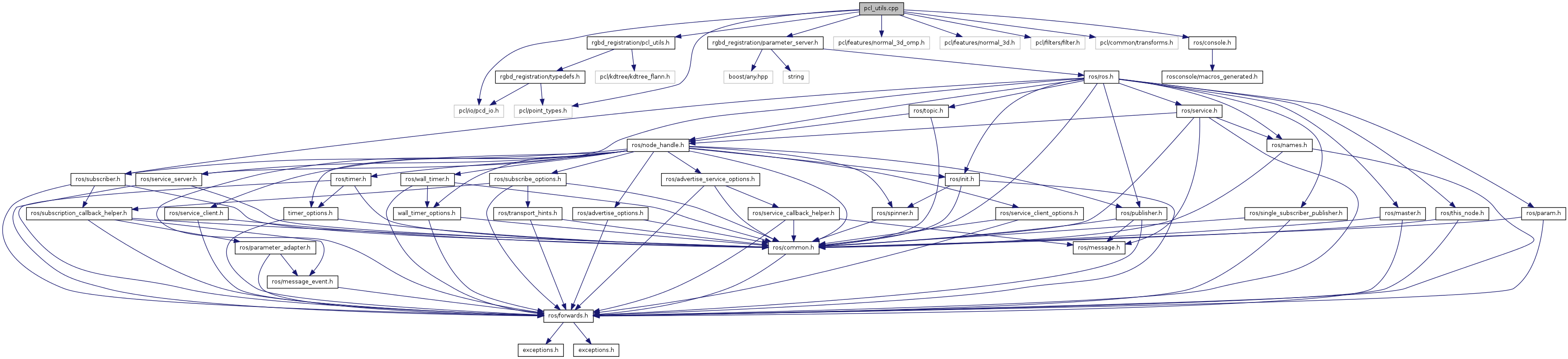
Go to the source code of this file.
| void calculatePointCloudNormals | ( | const PointCloudConstPtr | input_cloud_ptr, |
| PointCloudNormalsPtr | output_cloud_ptr | ||
| ) |
Definition at line 81 of file pcl_utils.cpp.
| void checkforNaNs | ( | const PointCloudNormalsConstPtr | input_cloud_ptr | ) |
Definition at line 118 of file pcl_utils.cpp.
| void removePointNormalsWithNaNs | ( | const PointCloudNormalsPtr | input_cloud_ptr | ) |
Definition at line 99 of file pcl_utils.cpp.
| void transformAndWriteToFile | ( | const PointCloudConstPtr | cloud_in, |
| const Eigen::Matrix4f & | trafo | ||
| ) |
Definition at line 35 of file pcl_utils.cpp.
| void transformAndWriteToFile | ( | const PointCloudConstPtr | cloud_in, |
| const std::vector< int > & | indices, | ||
| const Eigen::Matrix4f & | trafo | ||
| ) |
Definition at line 42 of file pcl_utils.cpp.
| void transformAndWriteToFile | ( | const PointCloudNormalsConstPtr | cloud_in, |
| const Eigen::Matrix4f & | trafo | ||
| ) |
Definition at line 66 of file pcl_utils.cpp.
| void transformAndWriteToFile | ( | const PointCloudNormalsConstPtr | cloud_in, |
| const std::vector< int > & | indices, | ||
| const Eigen::Matrix4f & | trafo | ||
| ) |
Definition at line 73 of file pcl_utils.cpp.
| void writePCDToFile | ( | const std::string & | fileName, |
| const PointCloudConstPtr | cloud_ptr | ||
| ) |
Definition at line 20 of file pcl_utils.cpp.
| void writePCDToFile | ( | const std::string & | fileName, |
| const PointCloudConstPtr | cloud_ptr, | ||
| const std::vector< int > & | indices | ||
| ) |
Definition at line 27 of file pcl_utils.cpp.
| void writePCDToFile | ( | const std::string & | fileName, |
| const PointCloudNormalsConstPtr | cloud_ptr | ||
| ) |
Definition at line 51 of file pcl_utils.cpp.
| void writePCDToFile | ( | const std::string & | fileName, |
| const PointCloudNormalsConstPtr | cloud_ptr, | ||
| const std::vector< int > & | indices | ||
| ) |
Definition at line 58 of file pcl_utils.cpp.

