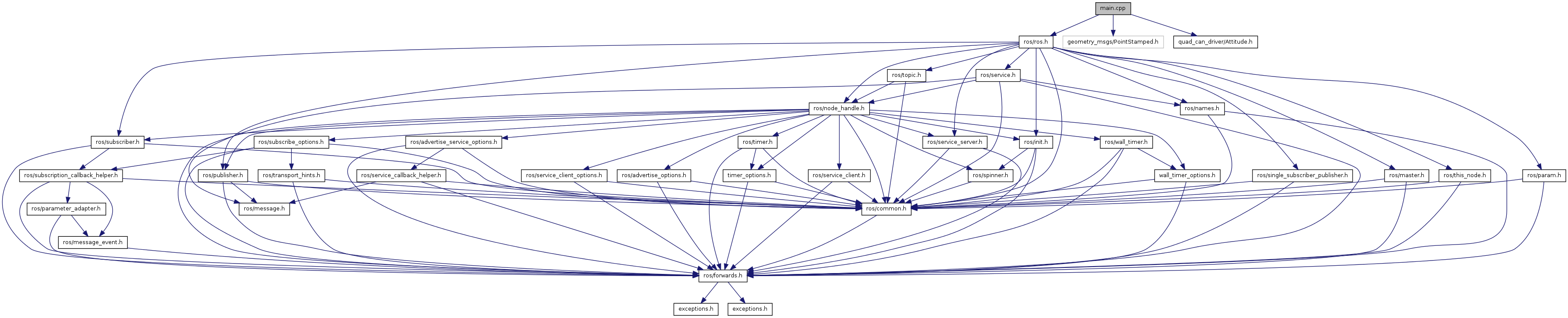
Include dependency graph for main.cpp:
Go to the source code of this file.
Classes | |
| struct | direction_vector |
Defines | |
| #define | angle_MAX 0.1745 |
| #define | angle_MIN -0.1745 |
| #define | PI 3.14159256 |
Functions | |
| void | Callback_pixels_disp (const geometry_msgs::PointStamped pixel_disp) |
| int | main (int argc, char **argv) |
Variables | |
| std::string | _pixels_topic_subscribe |
| quad_can_driver::Attitude | att_msg |
| ros::Publisher | att_pub |
| double | K |
| direction_vector | roll_pitch |
Define Documentation
Function Documentation
| void Callback_pixels_disp | ( | const geometry_msgs::PointStamped | pixel_disp | ) |
Variable Documentation
| std::string _pixels_topic_subscribe |