#include <ros/ros.h>#include <sensor_msgs/PointCloud.h>#include <SimpleGraspPlanner.h>#include <geometry_msgs/Pose.h>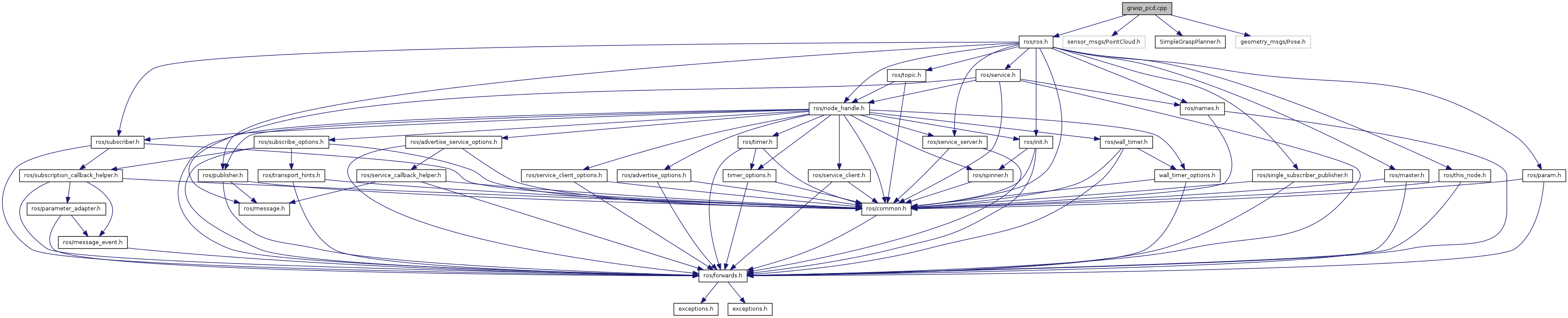
Go to the source code of this file.
Defines | |
| #define | MAX_HAND_POINTS 100 |
Functions | |
| void | cloud_cb (const PointCloudConstPtr &cloud) |
| void | GetParams (ros::NodeHandle &n) |
| int | main (int argc, char *argv[]) |
Variables | |
| Point3D | hand_points [MAX_HAND_POINTS] |
| double | param_start_side = 0.0 |
| double | param_start_top = 0.0 |
| ros::Publisher | pub |
| std::string | s_input_cloud_topic = "graspable_segments" |
| bool | s_need_cloud_data = true |
| std::string | s_output_cloud_topic = "hand_config" |
| #define MAX_HAND_POINTS 100 |
Definition at line 169 of file grasp_pcd.cpp.
| void cloud_cb | ( | const PointCloudConstPtr & | cloud | ) |
This callback calculates mean and cov from the incoming cloud and feeds it to sgp
> grasping target, in order to support obstacles this must be a list
The results can be Transformed r.g. with TransformPoint from the sgp library example would be:
Transform to quaternion
Calculate Trace
Definition at line 30 of file grasp_pcd.cpp.
| void GetParams | ( | ros::NodeHandle & | n | ) |
Definition at line 173 of file grasp_pcd.cpp.
| int main | ( | int | argc, |
| char * | argv[] | ||
| ) |
Definition at line 241 of file grasp_pcd.cpp.
Definition at line 171 of file grasp_pcd.cpp.
| double param_start_side = 0.0 |
Definition at line 26 of file grasp_pcd.cpp.
| double param_start_top = 0.0 |
These parameters depends on the rotation of the robot to the object only the first quadrant is searched, with this value the quadrant can be shifted. Robots might have different properties, so the quadrant to search might change for higher tables and higher grasps, so there are two values wich can be set on every query to sgp.
In this example we assume the object to be in the right orientation towards the robot.
Definition at line 25 of file grasp_pcd.cpp.
Definition at line 11 of file grasp_pcd.cpp.
| std::string s_input_cloud_topic = "graspable_segments" |
Definition at line 12 of file grasp_pcd.cpp.
| bool s_need_cloud_data = true |
Definition at line 10 of file grasp_pcd.cpp.
| std::string s_output_cloud_topic = "hand_config" |
Definition at line 13 of file grasp_pcd.cpp.

