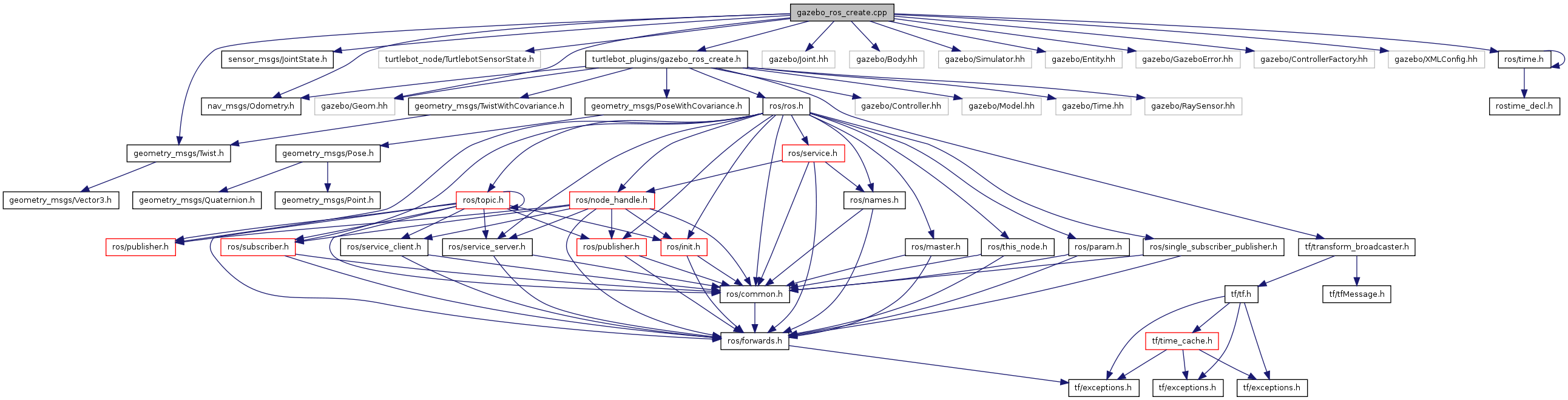
gazebo_ros_create.cpp File Reference
#include <nav_msgs/Odometry.h>
#include <sensor_msgs/JointState.h>
#include <geometry_msgs/Twist.h>
#include <turtlebot_node/TurtlebotSensorState.h>
#include <turtlebot_plugins/gazebo_ros_create.h>
#include <gazebo/Joint.hh>
#include <gazebo/Body.hh>
#include <gazebo/Geom.hh>
#include <gazebo/Simulator.hh>
#include <gazebo/Entity.hh>
#include <gazebo/GazeboError.hh>
#include <gazebo/ControllerFactory.hh>
#include <gazebo/XMLConfig.hh>
#include <ros/time.h>
Go to the source code of this file.
Enumeration Type Documentation
Function Documentation