#include <ompl_ros_state_transformer.h>
Public Member Functions | |
| virtual bool | configureOnRequest (const arm_navigation_msgs::GetMotionPlan::Request &request, arm_navigation_msgs::GetMotionPlan::Response &response)=0 |
| Configure the transformer when a request is received. This is typically a one time configuration for each planning request. | |
| virtual bool | forwardTransform (const arm_navigation_msgs::RobotState &robot_state, ompl::base::State &ompl_state)=0 |
| Compute the forward transform (from physical state to planning state). | |
| virtual arm_navigation_msgs::RobotState | getDefaultState ()=0 |
| Return a default state. | |
| virtual std::string | getFrame () |
| Return the frame in which planning state space is defined. | |
| virtual bool | initialize ()=0 |
| Custom initialization can be performed here. | |
| virtual bool | inverseTransform (const ompl::base::State &ompl_state, arm_navigation_msgs::RobotState &robot_state)=0 |
| Compute the inverse transform (from planning state to physical state). | |
| OmplRosStateTransformer (const ompl::base::StateSpacePtr &state_space, const planning_models::KinematicModel::JointModelGroup *physical_joint_model_group) | |
| Default constructor. | |
| ~OmplRosStateTransformer () | |
| Default constructor. | |
Protected Attributes | |
| const planning_models::KinematicModel::JointModelGroup * | physical_joint_model_group_ |
| ompl::base::StateSpacePtr | state_space_ |
Definition at line 58 of file ompl_ros_state_transformer.h.
| ompl_ros_interface::OmplRosStateTransformer::OmplRosStateTransformer | ( | const ompl::base::StateSpacePtr & | state_space, | |
| const planning_models::KinematicModel::JointModelGroup * | physical_joint_model_group | |||
| ) | [inline] |
Default constructor.
| state_space | - The state space that the planner is operating on | |
| physical_joint_model_group | - The "physical" joint model group that the planner is operating on | |
| frame_id | - The (possibly abstract) frame_id that the planner operates in. The frame_id in the planning request must match this frame_id. |
Definition at line 67 of file ompl_ros_state_transformer.h.
| ompl_ros_interface::OmplRosStateTransformer::~OmplRosStateTransformer | ( | ) | [inline] |
Default constructor.
Definition at line 77 of file ompl_ros_state_transformer.h.
| virtual bool ompl_ros_interface::OmplRosStateTransformer::configureOnRequest | ( | const arm_navigation_msgs::GetMotionPlan::Request & | request, | |
| arm_navigation_msgs::GetMotionPlan::Response & | response | |||
| ) | [pure virtual] |
Configure the transformer when a request is received. This is typically a one time configuration for each planning request.
| request | The request that the planner gets | |
| response | The response to the planning request |
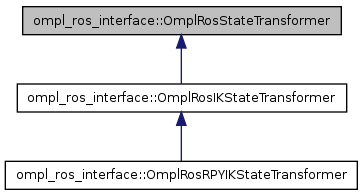
Implemented in ompl_ros_interface::OmplRosIKStateTransformer, and ompl_ros_interface::OmplRosRPYIKStateTransformer.
| virtual bool ompl_ros_interface::OmplRosStateTransformer::forwardTransform | ( | const arm_navigation_msgs::RobotState & | robot_state, | |
| ompl::base::State & | ompl_state | |||
| ) | [pure virtual] |
Compute the forward transform (from physical state to planning state).
| robot_State | - the physical state | |
| ompl_state | - the corresponding planning state |
Implemented in ompl_ros_interface::OmplRosIKStateTransformer, and ompl_ros_interface::OmplRosRPYIKStateTransformer.
| virtual arm_navigation_msgs::RobotState ompl_ros_interface::OmplRosStateTransformer::getDefaultState | ( | ) | [pure virtual] |
Return a default state.
Implemented in ompl_ros_interface::OmplRosIKStateTransformer, and ompl_ros_interface::OmplRosRPYIKStateTransformer.
| virtual std::string ompl_ros_interface::OmplRosStateTransformer::getFrame | ( | ) | [inline, virtual] |
Return the frame in which planning state space is defined.
Reimplemented in ompl_ros_interface::OmplRosIKStateTransformer.
Definition at line 112 of file ompl_ros_state_transformer.h.
| virtual bool ompl_ros_interface::OmplRosStateTransformer::initialize | ( | ) | [pure virtual] |
Custom initialization can be performed here.
Implemented in ompl_ros_interface::OmplRosIKStateTransformer, and ompl_ros_interface::OmplRosRPYIKStateTransformer.
| virtual bool ompl_ros_interface::OmplRosStateTransformer::inverseTransform | ( | const ompl::base::State & | ompl_state, | |
| arm_navigation_msgs::RobotState & | robot_state | |||
| ) | [pure virtual] |
Compute the inverse transform (from planning state to physical state).
| ompl_state | - the planning state | |
| robot_State | - the corresponding physical state |
Implemented in ompl_ros_interface::OmplRosIKStateTransformer, and ompl_ros_interface::OmplRosRPYIKStateTransformer.
const planning_models::KinematicModel::JointModelGroup* ompl_ros_interface::OmplRosStateTransformer::physical_joint_model_group_ [protected] |
Definition at line 121 of file ompl_ros_state_transformer.h.
ompl::base::StateSpacePtr ompl_ros_interface::OmplRosStateTransformer::state_space_ [protected] |
Definition at line 120 of file ompl_ros_state_transformer.h.

