#include "collision_checking/collision.h"#include "collision_checking/proximity.h"#include "collision_checking/continuous_collision.h"#include "collision_checking/conservative_advancement.h"#include "collision_checking/collision_geom.h"#include <limits>#include <cstdio>#include <LinearMath/btVector3.h>#include <LinearMath/btTransform.h>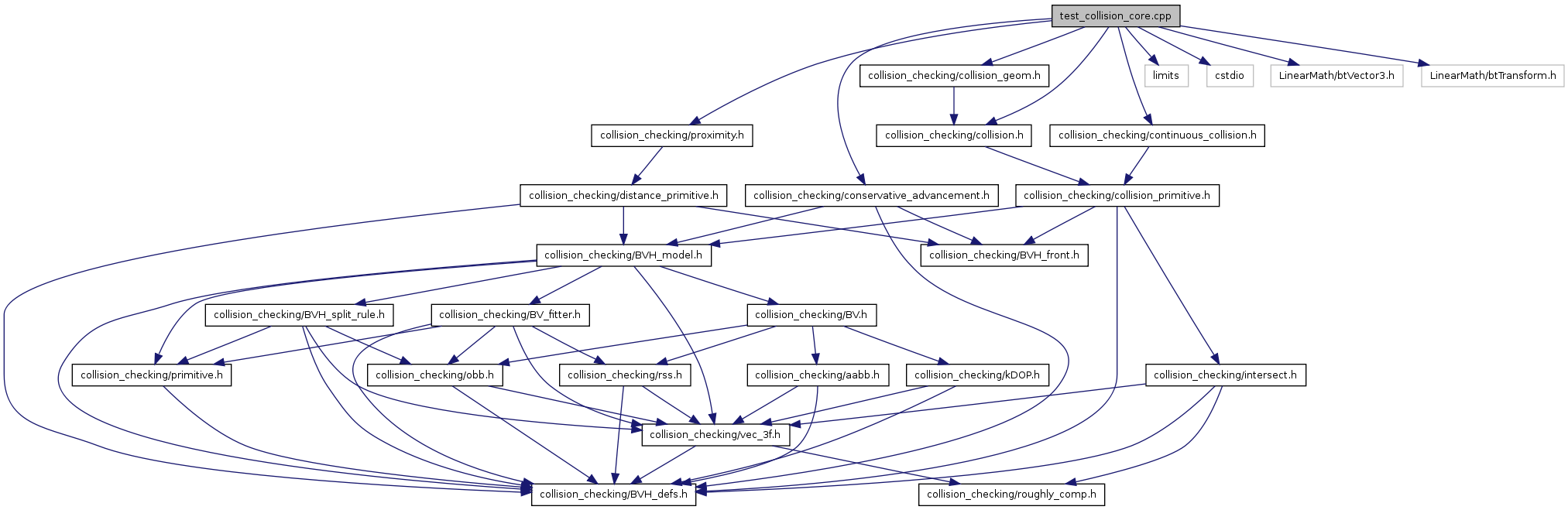
Go to the source code of this file.
Classes | |
| struct | CollisionPairComp |
Functions | |
| template<typename BV > | |
| bool | collide_front_Test (const btTransform &T, const btTransform &T2, const std::vector< Vec3f > &vertices1, const std::vector< Triangle > &triangles1, const std::vector< Vec3f > &vertices2, const std::vector< Triangle > &triangles2, SplitMethodType split_method, bool refit_bottomup=true, bool verbose=true) |
| template<typename BV > | |
| bool | collide_Test (const btTransform &T, const std::vector< Vec3f > &vertices1, const std::vector< Triangle > &triangles1, const std::vector< Vec3f > &vertices2, const std::vector< Triangle > &triangles2, SplitMethodType split_method, bool verbose=true) |
| bool | collide_Test2 (const btTransform &T, const std::vector< Vec3f > &vertices1, const std::vector< Triangle > &triangles1, const std::vector< Vec3f > &vertices2, const std::vector< Triangle > &triangles2, SplitMethodType split_method, bool verbose=true) |
| bool | continuous_collide_CA_Test (const btTransform &T, const btTransform &T2, const std::vector< Vec3f > &vertices1, const std::vector< Triangle > &triangles1, const std::vector< Vec3f > &vertices2, const std::vector< Triangle > &triangles2, SplitMethodType split_method, bool refit_bottomup=true, bool verbose=true) |
| template<typename BV > | |
| bool | continuous_collide_Test (const btTransform &T, const btTransform &T2, const std::vector< Vec3f > &vertices1, const std::vector< Triangle > &triangles1, const std::vector< Vec3f > &vertices2, const std::vector< Triangle > &triangles2, SplitMethodType split_method, bool refit_bottomup=true, bool verbose=true) |
| bool | distance_PQP (const btTransform &T, const std::vector< Vec3f > &vertices1, const std::vector< Triangle > &triangles1, const std::vector< Vec3f > &vertices2, const std::vector< Triangle > &triangles2, bool verbose=true) |
| bool | distance_PQP2 (const btTransform &T, const std::vector< Vec3f > &vertices1, const std::vector< Triangle > &triangles1, const std::vector< Vec3f > &vertices2, const std::vector< Triangle > &triangles2, bool verbose=true) |
| bool | distance_Test (const btTransform &T, const std::vector< Vec3f > &vertices1, const std::vector< Triangle > &triangles1, const std::vector< Vec3f > &vertices2, const std::vector< Triangle > &triangles2, SplitMethodType split_method, bool verbose=true) |
| bool | distanceQueue_Test (const btTransform &T, const std::vector< Vec3f > &vertices1, const std::vector< Triangle > &triangles1, const std::vector< Vec3f > &vertices2, const std::vector< Triangle > &triangles2, SplitMethodType split_method, bool verbose=true) |
| void | generateRandomTransform (BVH_REAL extents[6], std::vector< btTransform > &transforms, std::vector< btTransform > &transforms2, BVH_REAL delta_trans[3], BVH_REAL delta_rot, int n) |
| void | generateRandomTransform_ccd (BVH_REAL extents[6], std::vector< btTransform > &transforms, std::vector< btTransform > &transforms2, BVH_REAL delta_trans[3], BVH_REAL delta_rot, int n, const std::vector< Vec3f > &vertices1, const std::vector< Triangle > &triangles1, const std::vector< Vec3f > &vertices2, const std::vector< Triangle > &triangles2) |
| void | loadOBJFile (const char *filename, std::vector< Vec3f > &points, std::vector< Triangle > &triangles) |
| int | main (int argc, char **argv) |
| BVH_REAL | rand_interval (BVH_REAL rmin, BVH_REAL rmax) |
| void | sortCollisionPair (BVHCollisionPair *pairs, int n) |
Variables | |
| static const int | num_max_contacts = 10000 |
| bool collide_front_Test | ( | const btTransform & | T, | |
| const btTransform & | T2, | |||
| const std::vector< Vec3f > & | vertices1, | |||
| const std::vector< Triangle > & | triangles1, | |||
| const std::vector< Vec3f > & | vertices2, | |||
| const std::vector< Triangle > & | triangles2, | |||
| SplitMethodType | split_method, | |||
| bool | refit_bottomup = true, |
|||
| bool | verbose = true | |||
| ) | [inline] |
Definition at line 1095 of file test_collision_core.cpp.
| bool collide_Test | ( | const btTransform & | T, | |
| const std::vector< Vec3f > & | vertices1, | |||
| const std::vector< Triangle > & | triangles1, | |||
| const std::vector< Vec3f > & | vertices2, | |||
| const std::vector< Triangle > & | triangles2, | |||
| SplitMethodType | split_method, | |||
| bool | verbose = true | |||
| ) | [inline] |
Definition at line 690 of file test_collision_core.cpp.
| bool collide_Test2 | ( | const btTransform & | T, | |
| const std::vector< Vec3f > & | vertices1, | |||
| const std::vector< Triangle > & | triangles1, | |||
| const std::vector< Vec3f > & | vertices2, | |||
| const std::vector< Triangle > & | triangles2, | |||
| SplitMethodType | split_method, | |||
| bool | verbose = true | |||
| ) |
Definition at line 761 of file test_collision_core.cpp.
| bool continuous_collide_CA_Test | ( | const btTransform & | T, | |
| const btTransform & | T2, | |||
| const std::vector< Vec3f > & | vertices1, | |||
| const std::vector< Triangle > & | triangles1, | |||
| const std::vector< Vec3f > & | vertices2, | |||
| const std::vector< Triangle > & | triangles2, | |||
| SplitMethodType | split_method, | |||
| bool | refit_bottomup = true, |
|||
| bool | verbose = true | |||
| ) |
Definition at line 1257 of file test_collision_core.cpp.
| bool continuous_collide_Test | ( | const btTransform & | T, | |
| const btTransform & | T2, | |||
| const std::vector< Vec3f > & | vertices1, | |||
| const std::vector< Triangle > & | triangles1, | |||
| const std::vector< Vec3f > & | vertices2, | |||
| const std::vector< Triangle > & | triangles2, | |||
| SplitMethodType | split_method, | |||
| bool | refit_bottomup = true, |
|||
| bool | verbose = true | |||
| ) | [inline] |
Definition at line 1180 of file test_collision_core.cpp.
| bool distance_PQP | ( | const btTransform & | T, | |
| const std::vector< Vec3f > & | vertices1, | |||
| const std::vector< Triangle > & | triangles1, | |||
| const std::vector< Vec3f > & | vertices2, | |||
| const std::vector< Triangle > & | triangles2, | |||
| bool | verbose = true | |||
| ) |
| bool distance_PQP2 | ( | const btTransform & | T, | |
| const std::vector< Vec3f > & | vertices1, | |||
| const std::vector< Triangle > & | triangles1, | |||
| const std::vector< Vec3f > & | vertices2, | |||
| const std::vector< Triangle > & | triangles2, | |||
| bool | verbose = true | |||
| ) |
| bool distance_Test | ( | const btTransform & | T, | |
| const std::vector< Vec3f > & | vertices1, | |||
| const std::vector< Triangle > & | triangles1, | |||
| const std::vector< Vec3f > & | vertices2, | |||
| const std::vector< Triangle > & | triangles2, | |||
| SplitMethodType | split_method, | |||
| bool | verbose = true | |||
| ) |
Definition at line 835 of file test_collision_core.cpp.
| bool distanceQueue_Test | ( | const btTransform & | T, | |
| const std::vector< Vec3f > & | vertices1, | |||
| const std::vector< Triangle > & | triangles1, | |||
| const std::vector< Vec3f > & | vertices2, | |||
| const std::vector< Triangle > & | triangles2, | |||
| SplitMethodType | split_method, | |||
| bool | verbose = true | |||
| ) |
Definition at line 882 of file test_collision_core.cpp.
| void generateRandomTransform | ( | BVH_REAL | extents[6], | |
| std::vector< btTransform > & | transforms, | |||
| std::vector< btTransform > & | transforms2, | |||
| BVH_REAL | delta_trans[3], | |||
| BVH_REAL | delta_rot, | |||
| int | n | |||
| ) |
Definition at line 418 of file test_collision_core.cpp.
| void generateRandomTransform_ccd | ( | BVH_REAL | extents[6], | |
| std::vector< btTransform > & | transforms, | |||
| std::vector< btTransform > & | transforms2, | |||
| BVH_REAL | delta_trans[3], | |||
| BVH_REAL | delta_rot, | |||
| int | n, | |||
| const std::vector< Vec3f > & | vertices1, | |||
| const std::vector< Triangle > & | triangles1, | |||
| const std::vector< Vec3f > & | vertices2, | |||
| const std::vector< Triangle > & | triangles2 | |||
| ) |
Definition at line 456 of file test_collision_core.cpp.
| void loadOBJFile | ( | const char * | filename, | |
| std::vector< Vec3f > & | points, | |||
| std::vector< Triangle > & | triangles | |||
| ) |
Definition at line 318 of file test_collision_core.cpp.
| int main | ( | int | argc, | |
| char ** | argv | |||
| ) |
Definition at line 100 of file test_collision_core.cpp.
Definition at line 412 of file test_collision_core.cpp.
| void sortCollisionPair | ( | BVHCollisionPair * | pairs, | |
| int | n | |||
| ) |
Definition at line 1340 of file test_collision_core.cpp.
const int num_max_contacts = 10000 [static] |
Definition at line 98 of file test_collision_core.cpp.

