#include <vector>#include <limits>#include <set>#include <Inventor/SoType.h>#include "robot.h"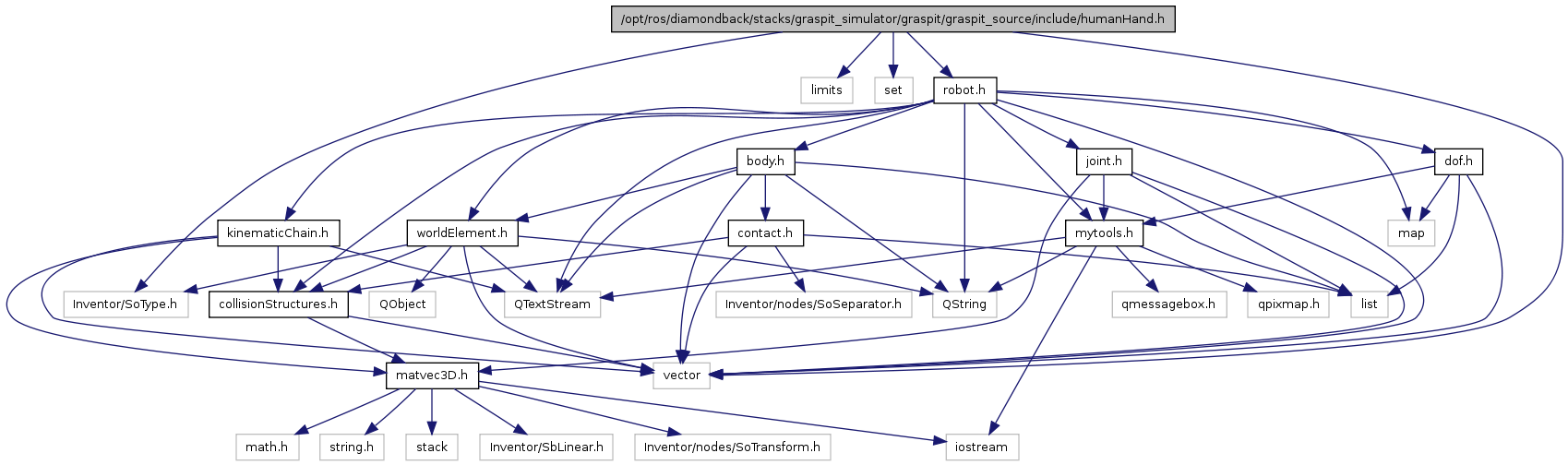

Go to the source code of this file.
Classes | |
| class | HumanHand |
| A hand with tendon information. More... | |
| class | Tendon |
| Defines a tendon geometry by listing its insertion points. More... | |
| class | TendonInsertionPoint |
| class | TendonWrapper |
This file in intended to define a HumanHand subclass from Hand, to encapsulate the specific characteristics for building an accurate model of a human hand. However, this is not complete, and not really used yet.
The main feature that is actually implemented here are tendons. We define all the frameworks for defining tendons in a hand, as a list if insertion points and wrappers. You can visualize tendons and also use them to actuate the hand, but only in the dynamics engine. However, this work is not complete. The human hand model that is delivered with GraspIt actually does not use this (yet).
Other features, such as soft fingers, have found their way out of the human hand as they are used for robotic hands as well.
Definition in file humanHand.h.

