#include <dae/daeDocument.h>#include <dom/domTypes.h>#include <dom/domElements.h>#include <dom/domKinematics_newparam.h>#include <dom/domInstance_joint.h>#include <dom/domJoint.h>#include <dom/domLink.h>#include <dom/domFormula.h>#include <dom/domInstance_formula.h>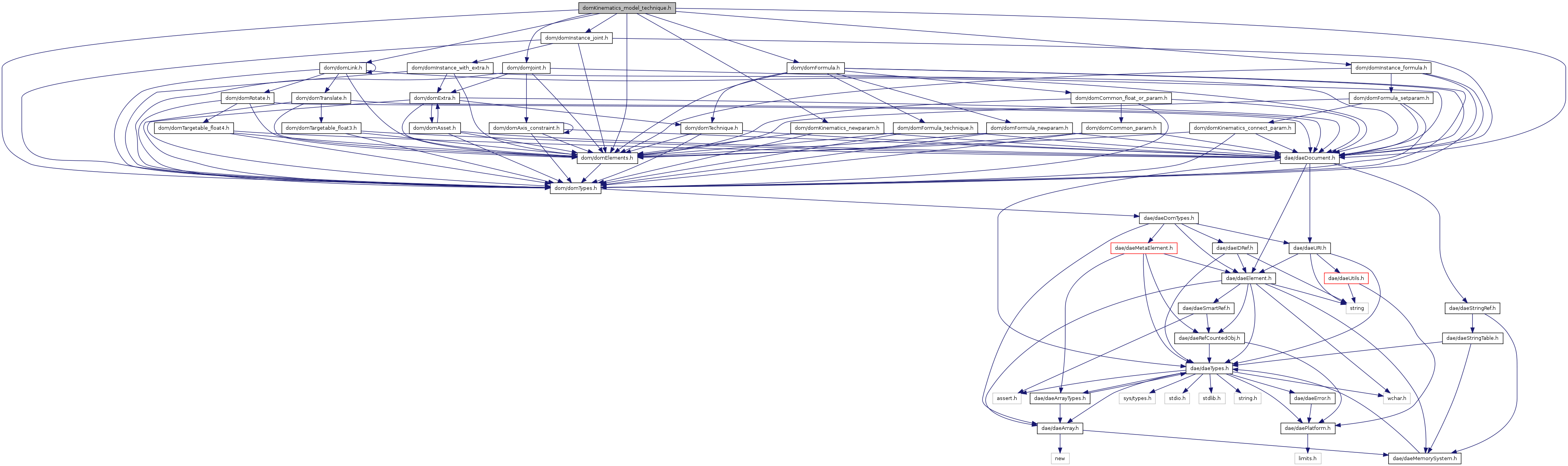
Go to the source code of this file.
Classes | |
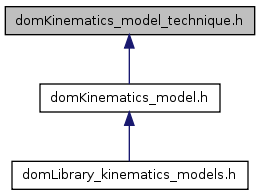
| class | domKinematics_model_technique |

