#include <btSimpleDynamicsWorld.h>
Public Member Functions | |
| virtual void | addRigidBody (btRigidBody *body) |
| btSimpleDynamicsWorld (btDispatcher *dispatcher, btBroadphaseInterface *pairCache, btConstraintSolver *constraintSolver, btCollisionConfiguration *collisionConfiguration) | |
| this btSimpleDynamicsWorld constructor creates dispatcher, broadphase pairCache and constraintSolver | |
| virtual void | clearForces () |
| virtual btConstraintSolver * | getConstraintSolver () |
| virtual btVector3 | getGravity () const |
| virtual btDynamicsWorldType | getWorldType () const |
| virtual void | removeCollisionObject (btCollisionObject *collisionObject) |
| removeCollisionObject will first check if it is a rigid body, if so call removeRigidBody otherwise call btCollisionWorld::removeCollisionObject | |
| virtual void | removeRigidBody (btRigidBody *body) |
| virtual void | setConstraintSolver (btConstraintSolver *solver) |
| virtual void | setGravity (const btVector3 &gravity) |
| virtual int | stepSimulation (btScalar timeStep, int maxSubSteps=1, btScalar fixedTimeStep=btScalar(1.)/btScalar(60.)) |
| maxSubSteps/fixedTimeStep for interpolation is currently ignored for btSimpleDynamicsWorld, use btDiscreteDynamicsWorld instead | |
| virtual void | synchronizeMotionStates () |
| virtual void | updateAabbs () |
| virtual | ~btSimpleDynamicsWorld () |
Protected Member Functions | |
| void | integrateTransforms (btScalar timeStep) |
| void | predictUnconstraintMotion (btScalar timeStep) |
Protected Attributes | |
| btConstraintSolver * | m_constraintSolver |
| btVector3 | m_gravity |
| bool | m_ownsConstraintSolver |
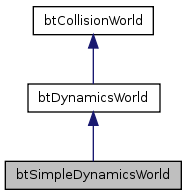
The btSimpleDynamicsWorld serves as unit-test and to verify more complicated and optimized dynamics worlds. Please use btDiscreteDynamicsWorld instead (or btContinuousDynamicsWorld once it is finished).
Definition at line 27 of file btSimpleDynamicsWorld.h.
| btSimpleDynamicsWorld::btSimpleDynamicsWorld | ( | btDispatcher * | dispatcher, | |
| btBroadphaseInterface * | pairCache, | |||
| btConstraintSolver * | constraintSolver, | |||
| btCollisionConfiguration * | collisionConfiguration | |||
| ) |
this btSimpleDynamicsWorld constructor creates dispatcher, broadphase pairCache and constraintSolver
| virtual btSimpleDynamicsWorld::~btSimpleDynamicsWorld | ( | ) | [virtual] |
| virtual void btSimpleDynamicsWorld::addRigidBody | ( | btRigidBody * | body | ) | [virtual] |
Implements btDynamicsWorld.
| virtual void btSimpleDynamicsWorld::clearForces | ( | ) | [virtual] |
Implements btDynamicsWorld.
| virtual btConstraintSolver* btSimpleDynamicsWorld::getConstraintSolver | ( | ) | [virtual] |
Implements btDynamicsWorld.
| virtual btVector3 btSimpleDynamicsWorld::getGravity | ( | ) | const [virtual] |
Implements btDynamicsWorld.
| virtual btDynamicsWorldType btSimpleDynamicsWorld::getWorldType | ( | ) | const [inline, virtual] |
Implements btDynamicsWorld.
Definition at line 72 of file btSimpleDynamicsWorld.h.
| void btSimpleDynamicsWorld::integrateTransforms | ( | btScalar | timeStep | ) | [protected] |
| void btSimpleDynamicsWorld::predictUnconstraintMotion | ( | btScalar | timeStep | ) | [protected] |
| virtual void btSimpleDynamicsWorld::removeCollisionObject | ( | btCollisionObject * | collisionObject | ) | [virtual] |
removeCollisionObject will first check if it is a rigid body, if so call removeRigidBody otherwise call btCollisionWorld::removeCollisionObject
Reimplemented from btCollisionWorld.
| virtual void btSimpleDynamicsWorld::removeRigidBody | ( | btRigidBody * | body | ) | [virtual] |
Implements btDynamicsWorld.
| virtual void btSimpleDynamicsWorld::setConstraintSolver | ( | btConstraintSolver * | solver | ) | [virtual] |
Implements btDynamicsWorld.
| virtual void btSimpleDynamicsWorld::setGravity | ( | const btVector3 & | gravity | ) | [virtual] |
Implements btDynamicsWorld.
| virtual int btSimpleDynamicsWorld::stepSimulation | ( | btScalar | timeStep, | |
| int | maxSubSteps = 1, |
|||
| btScalar | fixedTimeStep = btScalar(1.)/btScalar(60.) | |||
| ) | [virtual] |
maxSubSteps/fixedTimeStep for interpolation is currently ignored for btSimpleDynamicsWorld, use btDiscreteDynamicsWorld instead
Implements btDynamicsWorld.
| virtual void btSimpleDynamicsWorld::synchronizeMotionStates | ( | ) | [virtual] |
Implements btDynamicsWorld.
| virtual void btSimpleDynamicsWorld::updateAabbs | ( | ) | [virtual] |
Reimplemented from btCollisionWorld.
Definition at line 31 of file btSimpleDynamicsWorld.h.
btVector3 btSimpleDynamicsWorld::m_gravity [protected] |
Definition at line 39 of file btSimpleDynamicsWorld.h.
bool btSimpleDynamicsWorld::m_ownsConstraintSolver [protected] |
Definition at line 33 of file btSimpleDynamicsWorld.h.

