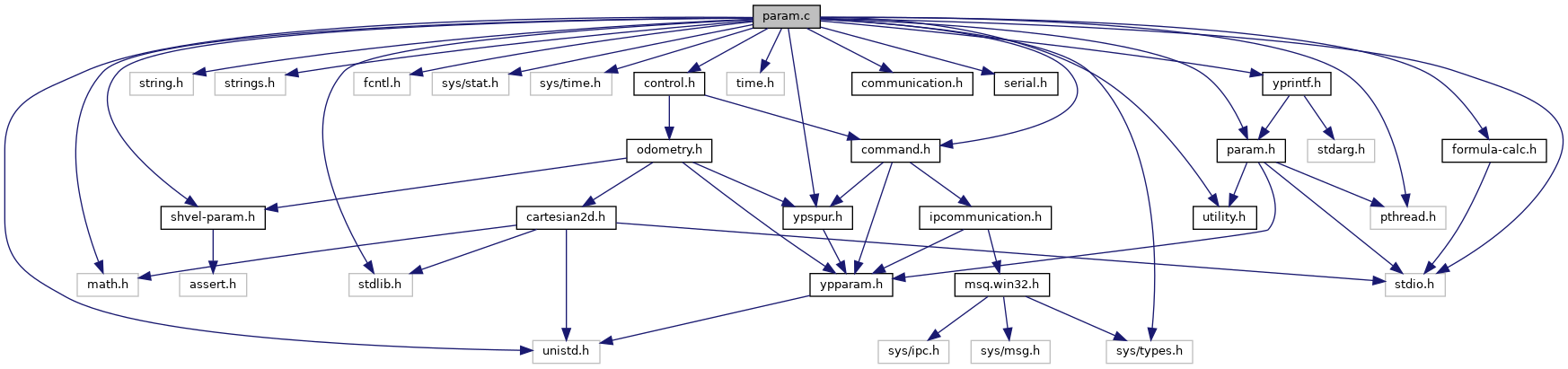
#include <math.h>
#include <stdio.h>
#include <stdlib.h>
#include <string.h>
#include <strings.h>
#include <unistd.h>
#include <fcntl.h>
#include <sys/stat.h>
#include <sys/time.h>
#include <sys/types.h>
#include <time.h>
#include <shvel-param.h>
#include <communication.h>
#include <serial.h>
#include <param.h>
#include <control.h>
#include <command.h>
#include <utility.h>
#include <yprintf.h>
#include <formula-calc.h>
#include <ypspur.h>
#include <pthread.h>
Go to the source code of this file.
|
| int | apply_robot_params () |
| |
| int | arg_analyze (int argc, char *argv[]) |
| |
| void | arg_help (int argc, char *argv[]) |
| |
| void | arg_longhelp (int argc, char *argv[]) |
| |
| void | calc_param_inertia2ff (void) |
| |
| void | disable_state (YPSpur_state id) |
| |
| void | enable_state (YPSpur_state id) |
| |
| ParametersPtr | get_param_ptr () |
| |
| void | init_param_update_thread (pthread_t *thread, char *filename) |
| |
| int | is_character (int c) |
| |
| int | is_number (int c) |
| |
| int | ischanged_p (YPSpur_param id, enum motor_id motor) |
| |
| int | isset_p (YPSpur_param id, enum motor_id motor) |
| |
| int | option (ParamOptions option) |
| |
| ParamOutputLv | output_lv (void) |
| |
| double | p (YPSpur_param id, enum motor_id motor) |
| |
| void | param_calc () |
| |
| void | param_help (void) |
| |
| void | param_update (void *filename) |
| |
| void | param_update_loop_cleanup (void *data) |
| |
| int | parameter_set (char param, char id, long long int value64) |
| |
| double * | pp (YPSpur_param id, enum motor_id motor) |
| |
| int | set_param (char *filename, char *concrete_path) |
| |
| int | set_param_motor (void) |
| |
| int | set_param_velocity (void) |
| |
| int | set_paramptr (FILE *paramfile) |
| |
| int | state (YPSpur_state id) |
| |
◆ VARIABLE_NUM
◆ apply_robot_params()
| int apply_robot_params |
( |
| ) |
|
◆ arg_analyze()
| int arg_analyze |
( |
int |
argc, |
|
|
char * |
argv[] |
|
) |
| |
◆ arg_help()
| void arg_help |
( |
int |
argc, |
|
|
char * |
argv[] |
|
) |
| |
◆ arg_longhelp()
| void arg_longhelp |
( |
int |
argc, |
|
|
char * |
argv[] |
|
) |
| |
◆ calc_param_inertia2ff()
| void calc_param_inertia2ff |
( |
void |
| ) |
|
◆ disable_state()
◆ enable_state()
◆ get_param_ptr()
◆ init_param_update_thread()
| void init_param_update_thread |
( |
pthread_t * |
thread, |
|
|
char * |
filename |
|
) |
| |
◆ is_character()
| int is_character |
( |
int |
c | ) |
|
◆ is_number()
◆ ischanged_p()
◆ isset_p()
◆ option()
◆ output_lv()
◆ p()
◆ param_calc()
◆ param_help()
◆ param_update()
| void param_update |
( |
void * |
filename | ) |
|
◆ param_update_loop_cleanup()
| void param_update_loop_cleanup |
( |
void * |
data | ) |
|
◆ parameter_set()
| int parameter_set |
( |
char |
param, |
|
|
char |
id, |
|
|
long long int |
value64 |
|
) |
| |
◆ pp()
◆ set_param()
| int set_param |
( |
char * |
filename, |
|
|
char * |
concrete_path |
|
) |
| |
◆ set_param_motor()
| int set_param_motor |
( |
void |
| ) |
|
◆ set_param_velocity()
| int set_param_velocity |
( |
void |
| ) |
|
◆ set_paramptr()
| int set_paramptr |
( |
FILE * |
paramfile | ) |
|
◆ state()
◆ g_P
◆ g_P_changed
◆ g_P_set
◆ g_param
◆ g_param_init
◆ g_Pf
◆ g_state