This file contains the linux-uart interface prototypes. More...
#include "toposens/sensor_lib.h"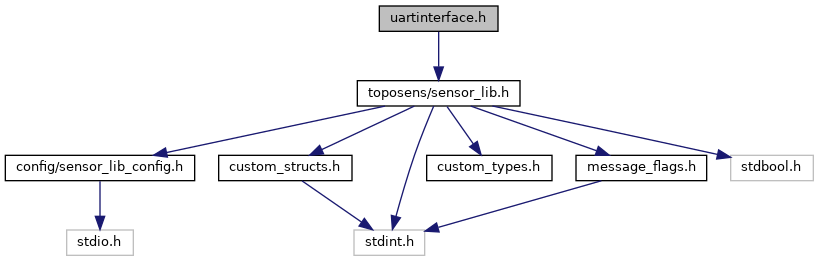
Go to the source code of this file.
Functions | |
| int | DeinitUARTPort () |
| Called from the can-library, this function will close the socket and take care of ReceiverThread termination. More... | |
| void | RegisterUARTReadCallback (void(*Callback)(uint8_t *UARTMsg_pu8, uint16_t UARTMsgSize_u16, uint8_t InterfaceId_u8)) |
| This function is called by the library to set a callback function for incoming can-traffic. More... | |
| int | SetupUARTPort (char *InterfaceName_cp, uint32_t InterfaceBitrate_u32, uint8_t InterfaceId_u8) |
| Called from the library, this function will take care of all linux-related uart-setup, socket configuration and starting of the receiver thread. More... | |
| int | WriteUARTPayload (uint8_t *Payload_pu8, uint8_t Length_u8, uint8_t InterfaceId_u8) |
| Called to send messages to can socket. More... | |
Detailed Description
This file contains the linux-uart interface prototypes.
- Copyright
- Copyright (c) Toposens GmbH 2021. All rights reserved.
Definition in file uartinterface.h.
Function Documentation
◆ DeinitUARTPort()
| int DeinitUARTPort | ( | ) |
Called from the can-library, this function will close the socket and take care of ReceiverThread termination.
- Returns
- int 0 if deinit was successful int 1 in case of an error
Definition at line 204 of file uartinterface.c.
◆ RegisterUARTReadCallback()
| void RegisterUARTReadCallback | ( | void(*)(uint8_t *UARTMsg_pu8, uint16_t UARTMsgSize_u16, uint8_t InterfaceId_u8) | Callback | ) |
This function is called by the library to set a callback function for incoming can-traffic.
- Parameters
-
[in] (*Callback) Function Pointer to function that shall be called-back if a can-frame was revived
Definition at line 126 of file uartinterface.c.
◆ SetupUARTPort()
| int SetupUARTPort | ( | char * | InterfaceName_cp, |
| uint32_t | InterfaceBitrate_u32, | ||
| uint8_t | InterfaceId_u8 | ||
| ) |
Called from the library, this function will take care of all linux-related uart-setup, socket configuration and starting of the receiver thread.
- Parameters
-
[in] *InterfaceName_cp interface-name that shall be configured [in] InterfaceBitrate_u32 Bitrate the interface should be working with [in] InterfaceId_u8
- Returns
- int 0 if setup was successful int 1 in case of an error
Definition at line 189 of file uartinterface.c.
◆ WriteUARTPayload()
| int WriteUARTPayload | ( | uint8_t * | Payload_pu8, |
| uint8_t | Length_u8, | ||
| uint8_t | InterfaceId_u8 | ||
| ) |
Called to send messages to can socket.
- Parameters
-
[in] *Payload_pu8 pointer to payload that should be send [in] Length_u8 [in] InterfaceId_u8
- Returns
- int 0 if the writing was successful int 1 in case of an error
Definition at line 140 of file uartinterface.c.