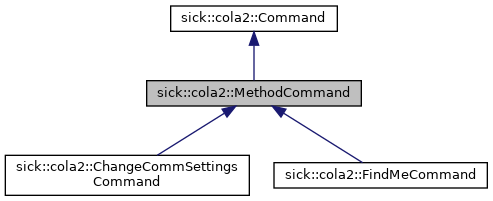
Command for method calls to the sensor. More...
#include <MethodCommand.h>
Public Member Functions | |
| std::vector< uint8_t > | addTelegramData (const std::vector< uint8_t > &telegram) const |
| Adds the data to the telegram. More... | |
| bool | canBeExecutedWithoutSessionID () const |
| Returns if the command can be executed without a session ID. Will return false for most commands except the commands to establish a connection. More... | |
| uint16_t | getMethodIndex () const |
| MethodCommand (Cola2Session &session, const uint16_t &method_index) | |
| Constructor of the method command. More... | |
| bool | processReply () |
| Processes the return from the sensor. More... | |
| void | setMethodIndex (const uint16_t &method_index) |
 Public Member Functions inherited from sick::cola2::Command Public Member Functions inherited from sick::cola2::Command | |
| Command (sick::cola2::Cola2Session &session, const uint16_t &command_type, const uint16_t &command_mode) | |
| Constructor of the command. Sets the common variables for a command to the sensor. More... | |
| std::vector< uint8_t > | constructTelegram (const std::vector< uint8_t > &telegram) const |
| Adds the data to the telegram and afterwards the header with the correct length. More... | |
| uint8_t | getCommandMode () const |
| Returns the command mode. More... | |
| uint8_t | getCommandType () const |
| Returns the command type. More... | |
| std::vector< uint8_t > | getDataVector () const |
| Returns the data vector. More... | |
| uint16_t | getRequestID () const |
| Returns the request id of the command. More... | |
| uint32_t | getSessionID () const |
| Returns the current session ID. More... | |
| void | lockExecutionMutex () |
| Locks a mutex to prevent other commands being executed in parallel. More... | |
| void | processReplyBase (const std::vector< uint8_t > &packet) |
| Parses the da incoming data package and then processes it with the inherited processReply. Afterwards the mutex will be unlocked to allow new commands to be send. More... | |
| void | setCommandMode (const uint8_t &command_mode) |
| Sets the command mode. More... | |
| void | setCommandType (const uint8_t &command_type) |
| Sets the command type. More... | |
| void | setDataVector (const std::vector< uint8_t > &data) |
| Sets the data vector. More... | |
| void | setRequestID (const uint16_t &request_id) |
| Sets the request ID of the command. More... | |
| void | setSessionID (const uint32_t &session_id) |
| Sets the session ID. More... | |
| void | waitForCompletion () |
| Scooped call to the mutex, which will block until the reply was processed. More... | |
| bool | wasSuccessful () const |
| Returns if the command was successfully parsed. More... | |
| virtual | ~Command () |
| We have virtual member functions, so a virtual destructor is needed. More... | |
Private Attributes | |
| uint16_t | m_method_index |
Additional Inherited Members | |
| Protected Member Functions inherited from sick::cola2::Command | |
| std::vector< uint8_t > | expandTelegram (const std::vector< uint8_t > &telegram, size_t additional_bytes) const |
| Protected Attributes inherited from sick::cola2::Command | |
| sick::cola2::Cola2Session & | m_session |
Detailed Description
Command for method calls to the sensor.
Definition at line 46 of file MethodCommand.h.
Constructor & Destructor Documentation
◆ MethodCommand()
| sick::cola2::MethodCommand::MethodCommand | ( | Cola2Session & | session, |
| const uint16_t & | method_index | ||
| ) |
Constructor of the method command.
- Parameters
-
session The current cola2 session. method_index The index of the method to call in the sensor.
Definition at line 43 of file MethodCommand.cpp.
Member Function Documentation
◆ addTelegramData()
|
virtual |
Adds the data to the telegram.
- Parameters
-
telegram The telegram which will be modified by the data.
- Returns
- Completed telegram
Implements sick::cola2::Command.
Definition at line 49 of file MethodCommand.cpp.
◆ canBeExecutedWithoutSessionID()
| bool sick::cola2::MethodCommand::canBeExecutedWithoutSessionID | ( | ) | const |
Returns if the command can be executed without a session ID. Will return false for most commands except the commands to establish a connection.
- Returns
- If the command needs a session ID to be executed.
Definition at line 58 of file MethodCommand.cpp.
◆ getMethodIndex()
| uint16_t sick::cola2::MethodCommand::getMethodIndex | ( | ) | const |
Definition at line 79 of file MethodCommand.cpp.
◆ processReply()
|
virtual |
Processes the return from the sensor.
- Returns
- If processing of the returned data was successful.
Implements sick::cola2::Command.
Definition at line 63 of file MethodCommand.cpp.
◆ setMethodIndex()
| void sick::cola2::MethodCommand::setMethodIndex | ( | const uint16_t & | method_index | ) |
Definition at line 84 of file MethodCommand.cpp.
Member Data Documentation
◆ m_method_index
|
private |
Definition at line 84 of file MethodCommand.h.
The documentation for this class was generated from the following files: