Highest-Level view on communication services.
More...
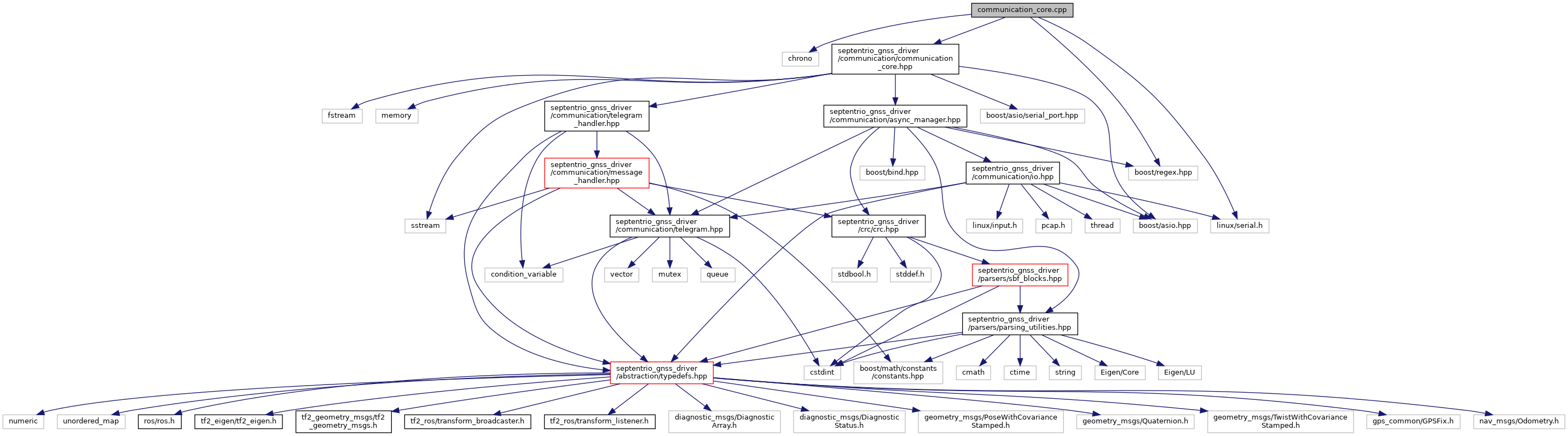
#include <chrono>
#include <filesystem>
#include <fstream>
#include <linux/serial.h>
#include <boost/regex.hpp>
#include <septentrio_gnss_driver/communication/communication_core.hpp>
Go to the source code of this file.
Highest-Level view on communication services.
- Date
- 22/08/20
Definition in file communication_core.cpp.
◆ ANGLE_MAX
| const int16_t ANGLE_MAX = 180 |
|
static |
◆ ANGLE_MIN
| const int16_t ANGLE_MIN = -180 |
|
static |
◆ ATTSTD_DEV_MAX
| const int8_t ATTSTD_DEV_MAX = 5 |
|
static |
◆ ATTSTD_DEV_MIN
| const int8_t ATTSTD_DEV_MIN = 0 |
|
static |
◆ HEADING_MAX
| const int16_t HEADING_MAX = 360 |
|
static |
◆ HEADING_MIN
| const int16_t HEADING_MIN = -360 |
|
static |
◆ LEVER_ARM_MAX
| const int8_t LEVER_ARM_MAX = 100 |
|
static |
◆ LEVER_ARM_MIN
| const int8_t LEVER_ARM_MIN = -100 |
|
static |
◆ PITCH_MAX
| const int8_t PITCH_MAX = 90 |
|
static |
◆ PITCH_MIN
| const int8_t PITCH_MIN = -90 |
|
static |
◆ POSSTD_DEV_MAX
| const int8_t POSSTD_DEV_MAX = 100 |
|
static |
◆ POSSTD_DEV_MIN
| const int8_t POSSTD_DEV_MIN = 0 |
|
static |
◆ THETA_Y_MAX
| const int8_t THETA_Y_MAX = 90 |
|
static |
◆ THETA_Y_MIN
| const int8_t THETA_Y_MIN = -90 |
|
static |