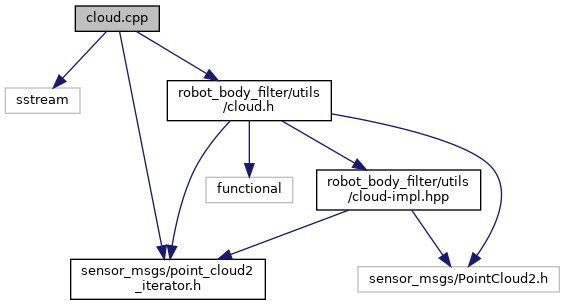
#include <sstream>#include <sensor_msgs/point_cloud2_iterator.h>#include <robot_body_filter/utils/cloud.h>
Include dependency graph for cloud.cpp:
Go to the source code of this file.
Namespaces | |
| robot_body_filter | |
| robot_body_filter::impl | |
Macros | |
| #define | private protected |
Functions | |
| void | robot_body_filter::copyChannelData (const Cloud &in, Cloud &out, const std::string &fieldName) |
| sensor_msgs::PointField & | robot_body_filter::getField (Cloud &cloud, const std::string &fieldName) |
| const sensor_msgs::PointField & | robot_body_filter::getField (const Cloud &cloud, const std::string &fieldName) |
| bool | robot_body_filter::hasField (const Cloud &cloud, const std::string &fieldName) |
| size_t | robot_body_filter::num_points (const Cloud &cloud) |
| size_t | robot_body_filter::sizeOfPointField (const sensor_msgs::PointField &field) |
| size_t | robot_body_filter::sizeOfPointField (int datatype) |