#include <statepublisher_rostopic.h>
Public Slots | |
| void | filterDialog (bool autoconfirm) |
| virtual void | setEnabled (bool enabled) override |
 Public Slots inherited from PJ::StatePublisher Public Slots inherited from PJ::StatePublisher | |
| virtual void | setEnabled (bool enabled)=0 |
Public Member Functions | |
| const std::vector< QAction * > & | availableActions () override |
| virtual bool | enabled () const override |
| virtual const char * | name () const override |
| virtual void | play (double interval) override |
| TopicPublisherROS () | |
| virtual void | updateState (double current_time) override |
| virtual | ~TopicPublisherROS () override |
| Public Member Functions inherited from PJ::StatePublisher | |
| void | setDataMap (const PlotDataMapRef *datamap) |
| virtual | ~StatePublisher ()=default |
| Public Member Functions inherited from PJ::PlotJugglerPlugin | |
| virtual bool | isDebugPlugin () |
| virtual QWidget * | optionsWidget () |
| PlotJugglerPlugin ()=default | |
| virtual bool | xmlLoadState (const QDomElement &parent_element) |
| QDomElement | xmlSaveState (QDomDocument &doc) const |
| virtual bool | xmlSaveState (QDomDocument &doc, QDomElement &parent_element) const |
Private Member Functions | |
| void | broadcastTF (double current_time) |
| void | publishAnyMsg (const rosbag::MessageInstance &msg_instance) |
| bool | toPublish (const std::string &topic_name) |
Private Attributes | |
| std::vector< QAction * > | _available_actions |
| ros::Publisher | _clock_publisher |
| bool | _enabled |
| ros::NodeHandlePtr | _node |
| int | _previous_play_index |
| bool | _publish_clock |
| std::map< std::string, ros::Publisher > | _publishers |
| QAction * | _select_topics_to_publish |
| std::shared_ptr< tf2_ros::TransformBroadcaster > | _tf_broadcaster |
| std::shared_ptr< tf2_ros::StaticTransformBroadcaster > | _tf_static_broadcaster |
| std::unordered_map< std::string, bool > | _topics_to_publish |
| double | previous_time |
Additional Inherited Members | |
| Signals inherited from PJ::StatePublisher | |
| void | closed () |
| Protected Attributes inherited from PJ::StatePublisher | |
| const PlotDataMapRef * | _datamap |
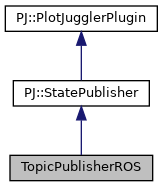
Detailed Description
Definition at line 15 of file statepublisher_rostopic.h.
Constructor & Destructor Documentation
◆ TopicPublisherROS()
| TopicPublisherROS::TopicPublisherROS | ( | ) |
Definition at line 26 of file statepublisher_rostopic.cpp.
◆ ~TopicPublisherROS()
|
overridevirtual |
Definition at line 41 of file statepublisher_rostopic.cpp.
Member Function Documentation
◆ availableActions()
|
overridevirtual |
Reimplemented from PJ::PlotJugglerPlugin.
Definition at line 46 of file statepublisher_rostopic.cpp.
◆ broadcastTF()
|
private |
Definition at line 172 of file statepublisher_rostopic.cpp.
◆ enabled()
|
inlineoverridevirtual |
Implements PJ::StatePublisher.
Definition at line 33 of file statepublisher_rostopic.h.
◆ filterDialog
|
slot |
Definition at line 96 of file statepublisher_rostopic.cpp.
◆ name()
|
inlineoverridevirtual |
Implements PJ::PlotJugglerPlugin.
Definition at line 28 of file statepublisher_rostopic.h.
◆ play()
|
overridevirtual |
Implements PJ::StatePublisher.
Definition at line 408 of file statepublisher_rostopic.cpp.
◆ publishAnyMsg()
|
private |
Definition at line 287 of file statepublisher_rostopic.cpp.
◆ setEnabled
|
overridevirtualslot |
Definition at line 51 of file statepublisher_rostopic.cpp.
◆ toPublish()
|
private |
Definition at line 274 of file statepublisher_rostopic.cpp.
◆ updateState()
|
overridevirtual |
Implements PJ::StatePublisher.
Definition at line 336 of file statepublisher_rostopic.cpp.
Member Data Documentation
◆ _available_actions
|
private |
Definition at line 73 of file statepublisher_rostopic.h.
◆ _clock_publisher
|
private |
Definition at line 61 of file statepublisher_rostopic.h.
◆ _enabled
|
private |
Definition at line 52 of file statepublisher_rostopic.h.
◆ _node
|
private |
Definition at line 54 of file statepublisher_rostopic.h.
◆ _previous_play_index
|
private |
Definition at line 71 of file statepublisher_rostopic.h.
◆ _publish_clock
|
private |
Definition at line 56 of file statepublisher_rostopic.h.
◆ _publishers
|
private |
Definition at line 50 of file statepublisher_rostopic.h.
◆ _select_topics_to_publish
|
private |
Definition at line 63 of file statepublisher_rostopic.h.
◆ _tf_broadcaster
|
private |
Definition at line 58 of file statepublisher_rostopic.h.
◆ _tf_static_broadcaster
|
private |
Definition at line 59 of file statepublisher_rostopic.h.
◆ _topics_to_publish
|
private |
Definition at line 65 of file statepublisher_rostopic.h.
◆ previous_time
|
private |
Definition at line 69 of file statepublisher_rostopic.h.
The documentation for this class was generated from the following files: