Public Member Functions | |
| def | captureImage (self, w=None, h=None) |
| def | disableCameraControl (self) |
| def | display (self, q=None) |
| def | displayCollisions (self, visibility) |
| def | displayVisuals (self, visibility) |
| def | drawFrameVelocities (self, *args, **kwargs) |
| def | enableCameraControl (self) |
| def | getViewerNodeName (self, geometry_object, geometry_type) |
| def | initViewer (self, viewer=None, load_model=False, open=True) |
| def | loadViewerModel (self, group_name, color=None) |
| def | setBackgroundColor (self) |
| def | setCameraPose (self, np.ndarray pose) |
| def | setCameraPosition (self, np.ndarray position) |
| def | setCameraTarget (self, target) |
| def | setCameraZoom (self, float zoom) |
 Public Member Functions inherited from pinocchio.visualize.base_visualizer.BaseVisualizer Public Member Functions inherited from pinocchio.visualize.base_visualizer.BaseVisualizer | |
| def | __init__ (self, model=pin.Model(), collision_model=None, visual_model=None, copy_models=False, data=None, collision_data=None, visual_data=None) |
| def | clean (self) |
| def | create_video_ctx (self, filename=None, fps=30, directory=None, **kwargs) |
| def | has_video_writer (self) |
| def | initViewer (self, *args, **kwargs) |
| def | loadViewerModel (self, *args, **kwargs) |
| def | play (self, q_trajectory, dt=None, callback=None, capture=False, **kwargs) |
| def | rebuildData (self) |
| def | reload (self, new_geometry_object, geometry_type=None) |
| def | sleep (self, dt) |
Public Attributes | |
| collision_group | |
| display_collisions | |
| display_visuals | |
| viewer | |
| visual_group | |
| Public Attributes inherited from pinocchio.visualize.base_visualizer.BaseVisualizer | |
| collision_data | |
| collision_model | |
| data | |
| model | |
| visual_data | |
| visual_model | |
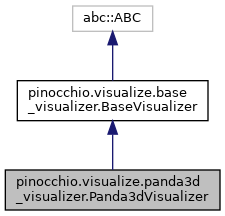
Detailed Description
A Pinocchio display using panda3d engine.
Definition at line 17 of file panda3d_visualizer.py.
Member Function Documentation
◆ captureImage()
| def pinocchio.visualize.panda3d_visualizer.Panda3dVisualizer.captureImage | ( | self, | |
w = None, |
|||
h = None |
|||
| ) |
Captures an image from the viewer and returns an RGB array.
Reimplemented from pinocchio.visualize.base_visualizer.BaseVisualizer.
Definition at line 147 of file panda3d_visualizer.py.
◆ disableCameraControl()
| def pinocchio.visualize.panda3d_visualizer.Panda3dVisualizer.disableCameraControl | ( | self | ) |
Disable camera manual control
Reimplemented from pinocchio.visualize.base_visualizer.BaseVisualizer.
Definition at line 153 of file panda3d_visualizer.py.
◆ display()
| def pinocchio.visualize.panda3d_visualizer.Panda3dVisualizer.display | ( | self, | |
q = None |
|||
| ) |
Display the robot at configuration q in the viewer by placing all the bodies.
Reimplemented from pinocchio.visualize.base_visualizer.BaseVisualizer.
Definition at line 100 of file panda3d_visualizer.py.
◆ displayCollisions()
| def pinocchio.visualize.panda3d_visualizer.Panda3dVisualizer.displayCollisions | ( | self, | |
| visibility | |||
| ) |
Set whether to display collision objects or not.
Reimplemented from pinocchio.visualize.base_visualizer.BaseVisualizer.
Definition at line 122 of file panda3d_visualizer.py.
◆ displayVisuals()
| def pinocchio.visualize.panda3d_visualizer.Panda3dVisualizer.displayVisuals | ( | self, | |
| visibility | |||
| ) |
Set whether to display visual objects or not.
Reimplemented from pinocchio.visualize.base_visualizer.BaseVisualizer.
Definition at line 127 of file panda3d_visualizer.py.
◆ drawFrameVelocities()
| def pinocchio.visualize.panda3d_visualizer.Panda3dVisualizer.drawFrameVelocities | ( | self, | |
| * | args, | ||
| ** | kwargs | ||
| ) |
Draw current frame velocities.
Reimplemented from pinocchio.visualize.base_visualizer.BaseVisualizer.
Definition at line 159 of file panda3d_visualizer.py.
◆ enableCameraControl()
| def pinocchio.visualize.panda3d_visualizer.Panda3dVisualizer.enableCameraControl | ( | self | ) |
Enable camera manual control
Reimplemented from pinocchio.visualize.base_visualizer.BaseVisualizer.
Definition at line 156 of file panda3d_visualizer.py.
◆ getViewerNodeName()
| def pinocchio.visualize.panda3d_visualizer.Panda3dVisualizer.getViewerNodeName | ( | self, | |
| geometry_object, | |||
| geometry_type | |||
| ) |
Return the name of the geometry object inside the viewer.
Reimplemented from pinocchio.visualize.base_visualizer.BaseVisualizer.
Definition at line 93 of file panda3d_visualizer.py.
◆ initViewer()
| def pinocchio.visualize.panda3d_visualizer.Panda3dVisualizer.initViewer | ( | self, | |
viewer = None, |
|||
load_model = False, |
|||
open = True |
|||
| ) |
Init the viewer by attaching to / creating a GUI viewer.
Definition at line 22 of file panda3d_visualizer.py.
◆ loadViewerModel()
| def pinocchio.visualize.panda3d_visualizer.Panda3dVisualizer.loadViewerModel | ( | self, | |
| group_name, | |||
color = None |
|||
| ) |
Create a group of nodes displaying the robot meshes in the viewer.
Definition at line 43 of file panda3d_visualizer.py.
◆ setBackgroundColor()
| def pinocchio.visualize.panda3d_visualizer.Panda3dVisualizer.setBackgroundColor | ( | self | ) |
Set the visualizer background color.
Reimplemented from pinocchio.visualize.base_visualizer.BaseVisualizer.
Definition at line 132 of file panda3d_visualizer.py.
◆ setCameraPose()
| def pinocchio.visualize.panda3d_visualizer.Panda3dVisualizer.setCameraPose | ( | self, | |
| np.ndarray | pose | ||
| ) |
Set camera 6D pose using a 4x4 matrix.
Reimplemented from pinocchio.visualize.base_visualizer.BaseVisualizer.
Definition at line 144 of file panda3d_visualizer.py.
◆ setCameraPosition()
| def pinocchio.visualize.panda3d_visualizer.Panda3dVisualizer.setCameraPosition | ( | self, | |
| np.ndarray | position | ||
| ) |
Set the camera's 3D position.
Reimplemented from pinocchio.visualize.base_visualizer.BaseVisualizer.
Definition at line 138 of file panda3d_visualizer.py.
◆ setCameraTarget()
| def pinocchio.visualize.panda3d_visualizer.Panda3dVisualizer.setCameraTarget | ( | self, | |
| target | |||
| ) |
Set the camera target.
Reimplemented from pinocchio.visualize.base_visualizer.BaseVisualizer.
Definition at line 135 of file panda3d_visualizer.py.
◆ setCameraZoom()
| def pinocchio.visualize.panda3d_visualizer.Panda3dVisualizer.setCameraZoom | ( | self, | |
| float | zoom | ||
| ) |
Set camera zoom value.
Reimplemented from pinocchio.visualize.base_visualizer.BaseVisualizer.
Definition at line 141 of file panda3d_visualizer.py.
Member Data Documentation
◆ collision_group
| pinocchio.visualize.panda3d_visualizer.Panda3dVisualizer.collision_group |
Definition at line 25 of file panda3d_visualizer.py.
◆ display_collisions
| pinocchio.visualize.panda3d_visualizer.Panda3dVisualizer.display_collisions |
Definition at line 27 of file panda3d_visualizer.py.
◆ display_visuals
| pinocchio.visualize.panda3d_visualizer.Panda3dVisualizer.display_visuals |
Definition at line 26 of file panda3d_visualizer.py.
◆ viewer
| pinocchio.visualize.panda3d_visualizer.Panda3dVisualizer.viewer |
Definition at line 28 of file panda3d_visualizer.py.
◆ visual_group
| pinocchio.visualize.panda3d_visualizer.Panda3dVisualizer.visual_group |
Definition at line 24 of file panda3d_visualizer.py.
The documentation for this class was generated from the following file: