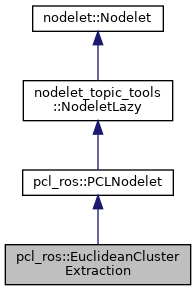
EuclideanClusterExtraction represents a segmentation class for cluster extraction in an Euclidean sense. More...
#include <extract_clusters.h>
Public Member Functions | |
| EuclideanClusterExtraction () | |
| Empty constructor. More... | |
 Public Member Functions inherited from pcl_ros::PCLNodelet Public Member Functions inherited from pcl_ros::PCLNodelet | |
| PCLNodelet () | |
| Empty constructor. More... | |
| Public Member Functions inherited from nodelet_topic_tools::NodeletLazy | |
| NodeletLazy () | |
| Public Member Functions inherited from nodelet::Nodelet | |
| void | init (const std::string &name, const M_string &remapping_args, const V_string &my_argv, ros::CallbackQueueInterface *st_queue=NULL, ros::CallbackQueueInterface *mt_queue=NULL) |
| Nodelet () | |
| virtual | ~Nodelet () |
Protected Member Functions | |
| void | config_callback (EuclideanClusterExtractionConfig &config, uint32_t level) |
| Dynamic reconfigure callback. More... | |
| void | input_indices_callback (const PointCloudConstPtr &cloud, const PointIndicesConstPtr &indices) |
| Input point cloud callback. More... | |
| void | onInit () |
| Nodelet initialization routine. More... | |
| void | subscribe () |
| LazyNodelet connection routine. More... | |
| void | unsubscribe () |
| Protected Member Functions inherited from pcl_ros::PCLNodelet | |
| bool | isValid (const ModelCoefficientsConstPtr &, const std::string &="model") |
| Test whether a given ModelCoefficients message is "valid" (i.e., has values). More... | |
| bool | isValid (const PointCloud2::ConstPtr &cloud, const std::string &topic_name="input") |
| Test whether a given PointCloud message is "valid" (i.e., has points, and width and height are non-zero). More... | |
| bool | isValid (const PointCloudConstPtr &cloud, const std::string &topic_name="input") |
| Test whether a given PointCloud message is "valid" (i.e., has points, and width and height are non-zero). More... | |
| bool | isValid (const PointIndicesConstPtr &, const std::string &="indices") |
| Test whether a given PointIndices message is "valid" (i.e., has values). More... | |
| Protected Member Functions inherited from nodelet_topic_tools::NodeletLazy | |
| ros::Publisher | advertise (ros::NodeHandle &nh, std::string topic, int queue_size, bool latch=false) |
| virtual void | connectionCallback (const ros::SingleSubscriberPublisher &pub) |
| virtual void | onInitPostProcess () |
| virtual void | warnNeverSubscribedCallback (const ros::WallTimerEvent &event) |
| Protected Member Functions inherited from nodelet::Nodelet | |
| ros::CallbackQueueInterface & | getMTCallbackQueue () const |
| ros::NodeHandle & | getMTNodeHandle () const |
| ros::NodeHandle & | getMTPrivateNodeHandle () const |
| const V_string & | getMyArgv () const |
| const std::string & | getName () const |
| ros::NodeHandle & | getNodeHandle () const |
| ros::NodeHandle & | getPrivateNodeHandle () const |
| const M_string & | getRemappingArgs () const |
| ros::CallbackQueueInterface & | getSTCallbackQueue () const |
| std::string | getSuffixedName (const std::string &suffix) const |
Protected Attributes | |
| int | max_clusters_ |
| Maximum number of clusters to publish. More... | |
| bool | publish_indices_ |
| Publish indices or convert to PointCloud clusters. Default: false. More... | |
| boost::shared_ptr< dynamic_reconfigure::Server< EuclideanClusterExtractionConfig > > | srv_ |
| Pointer to a dynamic reconfigure service. More... | |
| Protected Attributes inherited from pcl_ros::PCLNodelet | |
| bool | approximate_sync_ |
| True if we use an approximate time synchronizer versus an exact one (false by default). More... | |
| bool | latched_indices_ |
| Set to true if the indices topic is latched. More... | |
| int | max_queue_size_ |
| The maximum queue size (default: 3). More... | |
| ros::Publisher | pub_output_ |
| The output PointCloud publisher. More... | |
| message_filters::Subscriber< PointIndices > | sub_indices_filter_ |
| The message filter subscriber for PointIndices. More... | |
| message_filters::Subscriber< PointCloud > | sub_input_filter_ |
| The message filter subscriber for PointCloud2. More... | |
| tf::TransformListener | tf_listener_ |
| TF listener object. More... | |
| bool | use_indices_ |
| Set to true if point indices are used. More... | |
| Protected Attributes inherited from nodelet_topic_tools::NodeletLazy | |
| boost::mutex | connection_mutex_ |
| ConnectionStatus | connection_status_ |
| bool | ever_subscribed_ |
| bool | lazy_ |
| boost::shared_ptr< ros::NodeHandle > | nh_ |
| boost::shared_ptr< ros::NodeHandle > | pnh_ |
| std::vector< ros::Publisher > | publishers_ |
| ros::WallTimer | timer_ever_subscribed_ |
| bool | verbose_connection_ |
Private Attributes | |
| pcl::EuclideanClusterExtraction< pcl::PointXYZ > | impl_ |
| The PCL implementation used. More... | |
| ros::Subscriber | sub_input_ |
| The input PointCloud subscriber. More... | |
| boost::shared_ptr< message_filters::Synchronizer< sync_policies::ApproximateTime< PointCloud, PointIndices > > > | sync_input_indices_a_ |
| boost::shared_ptr< message_filters::Synchronizer< sync_policies::ExactTime< PointCloud, PointIndices > > > | sync_input_indices_e_ |
| Synchronized input, and indices. More... | |
Additional Inherited Members | |
| Public Types inherited from pcl_ros::PCLNodelet | |
| typedef pcl::IndicesConstPtr | IndicesConstPtr |
| typedef pcl::IndicesPtr | IndicesPtr |
| typedef pcl_msgs::ModelCoefficients | ModelCoefficients |
| typedef ModelCoefficients::ConstPtr | ModelCoefficientsConstPtr |
| typedef ModelCoefficients::Ptr | ModelCoefficientsPtr |
| typedef pcl::PointCloud< pcl::PointXYZ > | PointCloud |
| typedef sensor_msgs::PointCloud2 | PointCloud2 |
| typedef boost::shared_ptr< const PointCloud > | PointCloudConstPtr |
| typedef boost::shared_ptr< PointCloud > | PointCloudPtr |
| typedef pcl_msgs::PointIndices | PointIndices |
| typedef PointIndices::ConstPtr | PointIndicesConstPtr |
| typedef PointIndices::Ptr | PointIndicesPtr |
Detailed Description
EuclideanClusterExtraction represents a segmentation class for cluster extraction in an Euclidean sense.
Definition at line 57 of file extract_clusters.h.
Constructor & Destructor Documentation
◆ EuclideanClusterExtraction()
|
inline |
Empty constructor.
Definition at line 61 of file extract_clusters.h.
Member Function Documentation
◆ config_callback()
|
protected |
Dynamic reconfigure callback.
- Parameters
-
config the config object level the dynamic reconfigure level
Definition at line 140 of file extract_clusters.cpp.
◆ input_indices_callback()
|
protected |
Input point cloud callback.
- Parameters
-
cloud the pointer to the input point cloud indices the pointer to the input point cloud indices
DEBUG
Definition at line 166 of file extract_clusters.cpp.
◆ onInit()
|
protectedvirtual |
Nodelet initialization routine.
Reimplemented from pcl_ros::PCLNodelet.
Definition at line 50 of file extract_clusters.cpp.
◆ subscribe()
|
protectedvirtual |
LazyNodelet connection routine.
Reimplemented from pcl_ros::PCLNodelet.
Definition at line 98 of file extract_clusters.cpp.
◆ unsubscribe()
|
protectedvirtual |
Reimplemented from pcl_ros::PCLNodelet.
Definition at line 127 of file extract_clusters.cpp.
Member Data Documentation
◆ impl_
|
private |
The PCL implementation used.
Definition at line 95 of file extract_clusters.h.
◆ max_clusters_
|
protected |
Maximum number of clusters to publish.
Definition at line 69 of file extract_clusters.h.
◆ publish_indices_
|
protected |
Publish indices or convert to PointCloud clusters. Default: false.
Definition at line 61 of file extract_clusters.h.
◆ srv_
|
protected |
Pointer to a dynamic reconfigure service.
Definition at line 72 of file extract_clusters.h.
◆ sub_input_
|
private |
The input PointCloud subscriber.
Definition at line 98 of file extract_clusters.h.
◆ sync_input_indices_a_
|
private |
Definition at line 102 of file extract_clusters.h.
◆ sync_input_indices_e_
|
private |
Synchronized input, and indices.
Definition at line 101 of file extract_clusters.h.
The documentation for this class was generated from the following files: