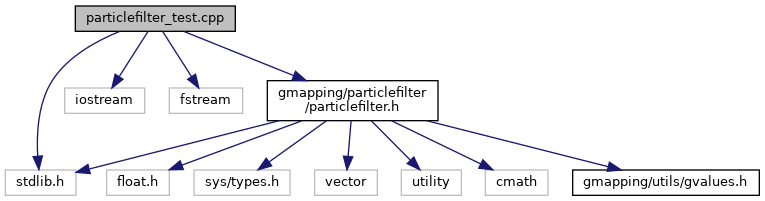
#include <stdlib.h>#include <iostream>#include <fstream>#include "gmapping/particlefilter/particlefilter.h"
Include dependency graph for particlefilter_test.cpp:
Go to the source code of this file.
Classes | |
| struct | EvolutionModel |
| struct | LikelyhoodModel |
| struct | Particle |
| struct | QualificationModel |
Macros | |
| #define | test(s) {cout << s << " " << flush;} |
| #define | testOk() {cout << "OK" << endl;} |
Functions | |
| int | main (unsigned int argc, const char *const *argv) |
| ostream & | printParticles (ostream &os, const vector< Particle > &p) |
Macro Definition Documentation
◆ test
| #define test | ( | s | ) | {cout << s << " " << flush;} |
Definition at line 8 of file particlefilter_test.cpp.
◆ testOk
| #define testOk | ( | ) | {cout << "OK" << endl;} |
Definition at line 9 of file particlefilter_test.cpp.
Function Documentation
◆ main()
| int main | ( | unsigned int | argc, |
| const char *const * | argv | ||
| ) |
Definition at line 47 of file particlefilter_test.cpp.
◆ printParticles()
| ostream& printParticles | ( | ostream & | os, |
| const vector< Particle > & | p | ||
| ) |
Definition at line 18 of file particlefilter_test.cpp.