Combine pre-planning, planning and post-planning to customize the your path. More...
#include <gpp_plugin.hpp>
Public Types | |
| using | Map = costmap_2d::Costmap2DROS |
| using | Path = std::vector< Pose > |
| using | Pose = geometry_msgs::PoseStamped |
 Public Types inherited from mbf_costmap_core::CostmapPlanner Public Types inherited from mbf_costmap_core::CostmapPlanner | |
| typedef boost::shared_ptr< ::mbf_costmap_core::CostmapPlanner > | Ptr |
| Public Types inherited from mbf_abstract_core::AbstractPlanner | |
| typedef boost::shared_ptr< ::mbf_abstract_core::AbstractPlanner > | Ptr |
Public Member Functions | |
| bool | cancel () override |
| void | initialize (std::string name, Map *costmap_ros) override |
| bool | makePlan (const Pose &_start, const Pose &_goal, Path &_plan) override |
| bool | makePlan (const Pose &_start, const Pose &_goal, Path &_plan, double &_cost) override |
| uint32_t | makePlan (const Pose &start, const Pose &goal, double tolerance, Path &plan, double &cost, std::string &message) override |
| Public Member Functions inherited from nav_core::BaseGlobalPlanner | |
| virtual bool | makePlan (const geometry_msgs::PoseStamped &start, const geometry_msgs::PoseStamped &goal, std::vector< geometry_msgs::PoseStamped > &plan)=0 |
| virtual bool | makePlan (const geometry_msgs::PoseStamped &start, const geometry_msgs::PoseStamped &goal, std::vector< geometry_msgs::PoseStamped > &plan, double &cost) |
| virtual | ~BaseGlobalPlanner () |
| Public Member Functions inherited from mbf_costmap_core::CostmapPlanner | |
| virtual uint32_t | makePlan (const geometry_msgs::PoseStamped &start, const geometry_msgs::PoseStamped &goal, double tolerance, std::vector< geometry_msgs::PoseStamped > &plan, double &cost, std::string &message)=0 |
| virtual | ~CostmapPlanner () |
| Public Member Functions inherited from mbf_abstract_core::AbstractPlanner | |
| virtual | ~AbstractPlanner () |
Private Member Functions | |
| bool | globalPlanning (const Pose &_start, const Pose &_goal, Path &_plan, double &_cost) |
| bool | postPlanning (const Pose &_start, const Pose &_goal, Path &_path, double &_cost) |
| bool | prePlanning (Pose &_start, Pose &_goal) |
Private Attributes | |
| std::atomic_bool | cancel_ |
| Map * | costmap_ = nullptr |
| CostmapPlannerManager | global_planning_ |
| std::string | name_ |
| PostPlanningManager | post_planning_ |
| PrePlanningManager | pre_planning_ |
Additional Inherited Members | |
| Protected Member Functions inherited from nav_core::BaseGlobalPlanner | |
| BaseGlobalPlanner () | |
| Protected Member Functions inherited from mbf_costmap_core::CostmapPlanner | |
| CostmapPlanner () | |
| Protected Member Functions inherited from mbf_abstract_core::AbstractPlanner | |
| AbstractPlanner () | |
Detailed Description
Combine pre-planning, planning and post-planning to customize the your path.
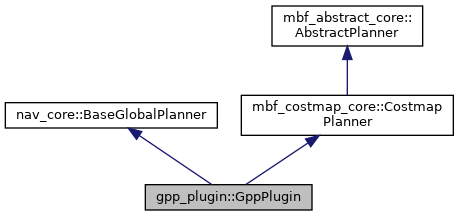
The planner implements BaseGlobalPlanner and CostmapPlanner interfaces.
Parameters
Define the pre_planning plugins under the tag pre_planning: those plugins must implement gpp_interface::PrePlanningInterface.
Define planning plugins under the tag planning: those plugins must implement either nav_core::BaseLocalPlanner or 'mbf_costmap_core::CostmapPlanner`.
Define post_planning plugins under tha tag post_planning: those plugins must implement gpp_interface::PostPlanningInterface.
The plugins under every tag (pre_planning, planning or post_planning) must be defined as an array. Every element withing the array must have the tags name and type - following the standard ros syntax for pluginlib-loaded plugins.
Below is a code example
Definition at line 410 of file gpp_plugin.hpp.
Member Typedef Documentation
◆ Map
Definition at line 414 of file gpp_plugin.hpp.
◆ Path
| using gpp_plugin::GppPlugin::Path = std::vector<Pose> |
Definition at line 413 of file gpp_plugin.hpp.
◆ Pose
| using gpp_plugin::GppPlugin::Pose = geometry_msgs::PoseStamped |
Definition at line 412 of file gpp_plugin.hpp.
Member Function Documentation
◆ cancel()
|
overridevirtual |
Implements mbf_costmap_core::CostmapPlanner.
Definition at line 292 of file gpp_plugin.cpp.
◆ globalPlanning()
|
private |
Definition at line 244 of file gpp_plugin.cpp.
◆ initialize()
|
overridevirtual |
Implements mbf_costmap_core::CostmapPlanner.
Definition at line 213 of file gpp_plugin.cpp.
◆ makePlan() [1/3]
|
override |
Definition at line 253 of file gpp_plugin.cpp.
◆ makePlan() [2/3]
|
override |
Definition at line 259 of file gpp_plugin.cpp.
◆ makePlan() [3/3]
|
override |
Definition at line 266 of file gpp_plugin.cpp.
◆ postPlanning()
|
private |
Definition at line 235 of file gpp_plugin.cpp.
◆ prePlanning()
Definition at line 227 of file gpp_plugin.cpp.
Member Data Documentation
◆ cancel_
|
private |
Definition at line 444 of file gpp_plugin.hpp.
◆ costmap_
|
private |
Definition at line 448 of file gpp_plugin.hpp.
◆ global_planning_
|
private |
Definition at line 452 of file gpp_plugin.hpp.
◆ name_
|
private |
Definition at line 447 of file gpp_plugin.hpp.
◆ post_planning_
|
private |
Definition at line 451 of file gpp_plugin.hpp.
◆ pre_planning_
|
private |
Definition at line 450 of file gpp_plugin.hpp.
The documentation for this struct was generated from the following files: