Joints hold current values. More...
Public Member Functions | |
| def | __init__ (self, device, name) |
| Constructs a Joint instance. More... | |
| def | getDiagnostics (self) |
| Get a diagnostics message for this joint. More... | |
| def | interpolate (self, frame) |
| Get new output, in raw data format. More... | |
| def | setControlOutput (self, position) |
| Set the goal position. More... | |
| def | setCurrentFeedback (self, raw_data) |
| Set the current position from feedback data. More... | |
Public Attributes | |
| controller | |
| device | |
| last | |
| name | |
| position | |
| velocity | |
Detailed Description
Constructor & Destructor Documentation
◆ __init__()
| def arbotix_python.joints.Joint.__init__ | ( | self, | |
| device, | |||
| name | |||
| ) |
Constructs a Joint instance.
- Parameters
-
device The arbotix instance. name The joint name.
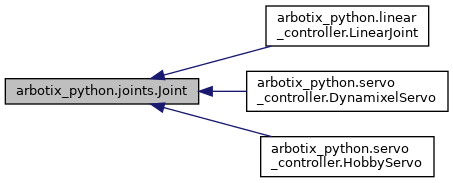
Reimplemented in arbotix_python.linear_controller.LinearJoint.
Member Function Documentation
◆ getDiagnostics()
| def arbotix_python.joints.Joint.getDiagnostics | ( | self | ) |
Get a diagnostics message for this joint.
- Returns
- Diagnostics message.
Reimplemented in arbotix_python.servo_controller.HobbyServo, arbotix_python.servo_controller.DynamixelServo, and arbotix_python.linear_controller.LinearJoint.
◆ interpolate()
| def arbotix_python.joints.Joint.interpolate | ( | self, | |
| frame | |||
| ) |
Get new output, in raw data format.
- Parameters
-
frame The frame length in seconds to interpolate forward.
- Returns
- The new output, in raw data format.
Reimplemented in arbotix_python.servo_controller.HobbyServo, arbotix_python.servo_controller.DynamixelServo, and arbotix_python.linear_controller.LinearJoint.
◆ setControlOutput()
| def arbotix_python.joints.Joint.setControlOutput | ( | self, | |
| position | |||
| ) |
Set the goal position.
- Parameters
-
position The goal position, in radians/meters.
- Returns
- The output position, in raw data format.
Reimplemented in arbotix_python.servo_controller.HobbyServo, arbotix_python.servo_controller.DynamixelServo, and arbotix_python.linear_controller.LinearJoint.
◆ setCurrentFeedback()
| def arbotix_python.joints.Joint.setCurrentFeedback | ( | self, | |
| raw_data | |||
| ) |
Set the current position from feedback data.
- Parameters
-
raw_data The current feedback.
- Returns
- The current position, in radians/meters.
Reimplemented in arbotix_python.servo_controller.DynamixelServo, arbotix_python.linear_controller.LinearJoint, and arbotix_python.servo_controller.HobbyServo.
Member Data Documentation
◆ controller
◆ device
◆ last
◆ name
◆ position
◆ velocity
The documentation for this class was generated from the following file: