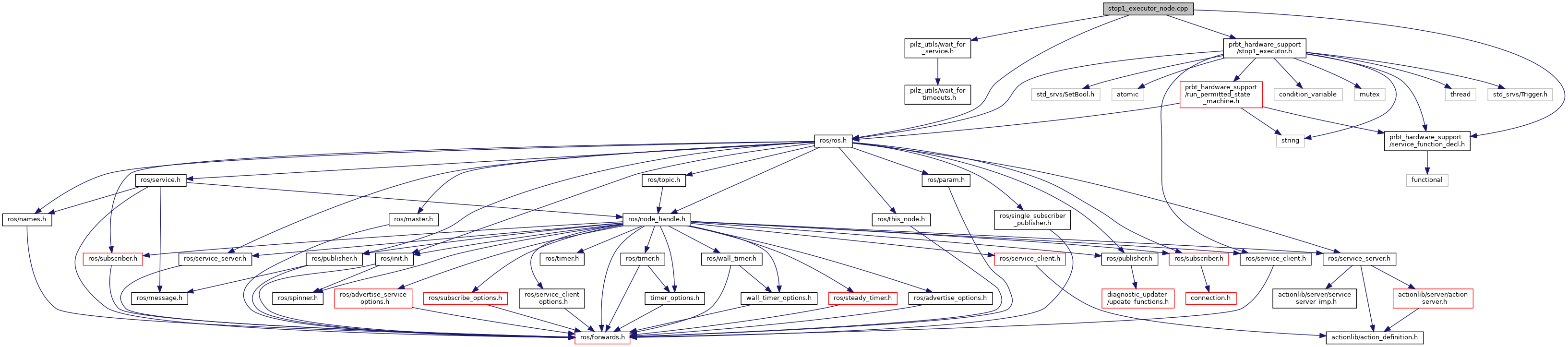
#include <ros/ros.h>#include <pilz_utils/wait_for_service.h>#include <prbt_hardware_support/stop1_executor.h>#include <prbt_hardware_support/service_function_decl.h>
Include dependency graph for stop1_executor_node.cpp:
Go to the source code of this file.
Namespaces | |
| prbt_hardware_support | |
Functions | |
| bool | prbt_hardware_support::callService (ros::ServiceClient &srv_client) |
| int | main (int argc, char **argv) |
Variables | |
| const std::string | HALT_SERVICE { "driver/halt" } |
| const std::string | HOLD_SERVICE { "manipulator_joint_trajectory_controller/hold" } |
| const std::string | RECOVER_SERVICE { "driver/recover" } |
| const std::string | UNHOLD_SERVICE { "manipulator_joint_trajectory_controller/unhold" } |
Function Documentation
◆ main()
| int main | ( | int | argc, |
| char ** | argv | ||
| ) |
Definition at line 55 of file stop1_executor_node.cpp.
Variable Documentation
◆ HALT_SERVICE
| const std::string HALT_SERVICE { "driver/halt" } |
Definition at line 28 of file stop1_executor_node.cpp.
◆ HOLD_SERVICE
| const std::string HOLD_SERVICE { "manipulator_joint_trajectory_controller/hold" } |
Definition at line 25 of file stop1_executor_node.cpp.
◆ RECOVER_SERVICE
| const std::string RECOVER_SERVICE { "driver/recover" } |
Definition at line 27 of file stop1_executor_node.cpp.
◆ UNHOLD_SERVICE
| const std::string UNHOLD_SERVICE { "manipulator_joint_trajectory_controller/unhold" } |
Definition at line 26 of file stop1_executor_node.cpp.