Publishes the constant flow velocity in ROS messages and creates a service to alter the flow model in runtime. More...
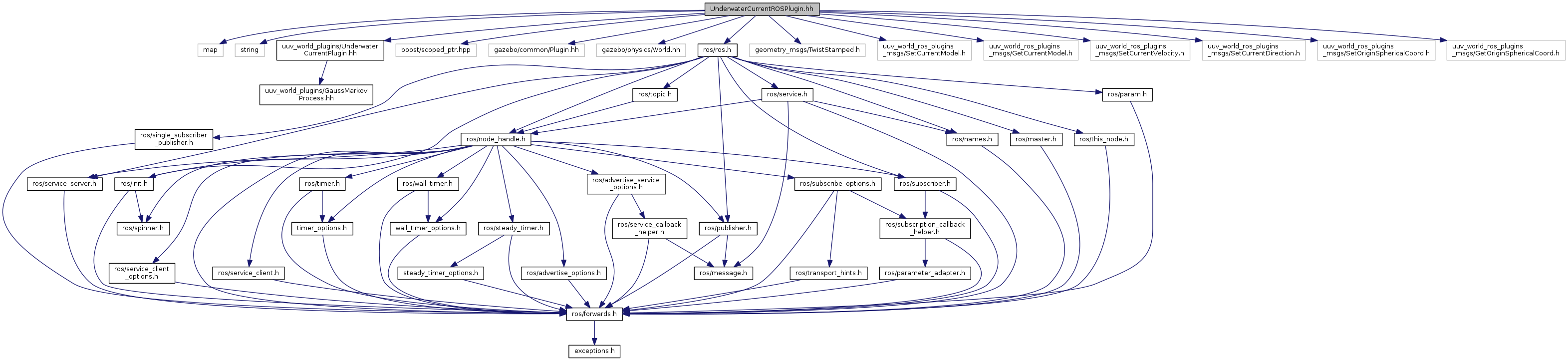
#include <map>#include <string>#include <uuv_world_plugins/UnderwaterCurrentPlugin.hh>#include <boost/scoped_ptr.hpp>#include <gazebo/common/Plugin.hh>#include <gazebo/physics/World.hh>#include <ros/ros.h>#include <geometry_msgs/TwistStamped.h>#include <uuv_world_ros_plugins_msgs/SetCurrentModel.h>#include <uuv_world_ros_plugins_msgs/GetCurrentModel.h>#include <uuv_world_ros_plugins_msgs/SetCurrentVelocity.h>#include <uuv_world_ros_plugins_msgs/SetCurrentDirection.h>#include <uuv_world_ros_plugins_msgs/SetOriginSphericalCoord.h>#include <uuv_world_ros_plugins_msgs/GetOriginSphericalCoord.h>
Include dependency graph for UnderwaterCurrentROSPlugin.hh:
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | uuv_simulator_ros::UnderwaterCurrentROSPlugin |
Namespaces | |
| uuv_simulator_ros | |
Detailed Description
Publishes the constant flow velocity in ROS messages and creates a service to alter the flow model in runtime.
Definition in file UnderwaterCurrentROSPlugin.hh.