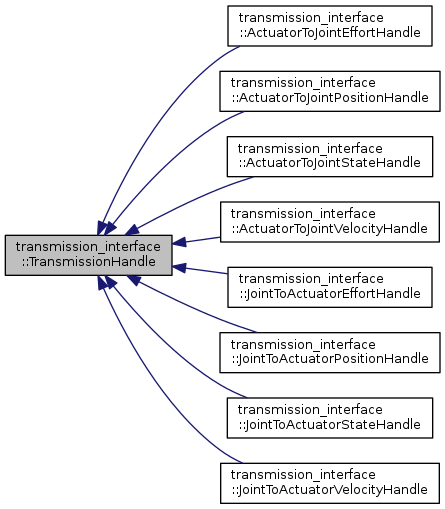
Handle for propagating a single map (position, velocity, or effort) on a single transmission (eg. actuator to joint effort for a simple reducer).
More...
#include <transmission_interface.h>
Handle for propagating a single map (position, velocity, or effort) on a single transmission (eg. actuator to joint effort for a simple reducer).
Definition at line 48 of file transmission_interface.h.
| transmission_interface::TransmissionHandle::TransmissionHandle |
( |
const std::string & |
name, |
|
|
Transmission * |
transmission, |
|
|
const ActuatorData & |
actuator_data, |
|
|
const JointData & |
joint_data |
|
) |
| |
|
inlineprotected |
- Parameters
-
| name | Transmission name. |
| transmission | Pointer to transmission instance. |
| actuator_data | Actuator-space variables. |
| joint_data | Joint-space variables. |
- Note
- The lifecycle of the pointed-to instances passed as parameters is not handled by this class.
- Precondition
- Valid transmission pointer. Actuator and joint variable vectors required by this handle must contain valid data and their size should be consistent with the number of transmission actuators and joints. Data vectors not used by this handle can remain empty.
Definition at line 70 of file transmission_interface.h.
| std::string transmission_interface::TransmissionHandle::getName |
( |
| ) |
const |
|
inline |
| static bool transmission_interface::TransmissionHandle::hasValidPointers |
( |
const std::vector< double * > & |
data | ) |
|
|
inlinestaticprivate |
| ActuatorData transmission_interface::TransmissionHandle::actuator_data_ |
|
protected |
| JointData transmission_interface::TransmissionHandle::joint_data_ |
|
protected |
| std::string transmission_interface::TransmissionHandle::name_ |
|
protected |
| Transmission* transmission_interface::TransmissionHandle::transmission_ |
|
protected |
The documentation for this class was generated from the following file: