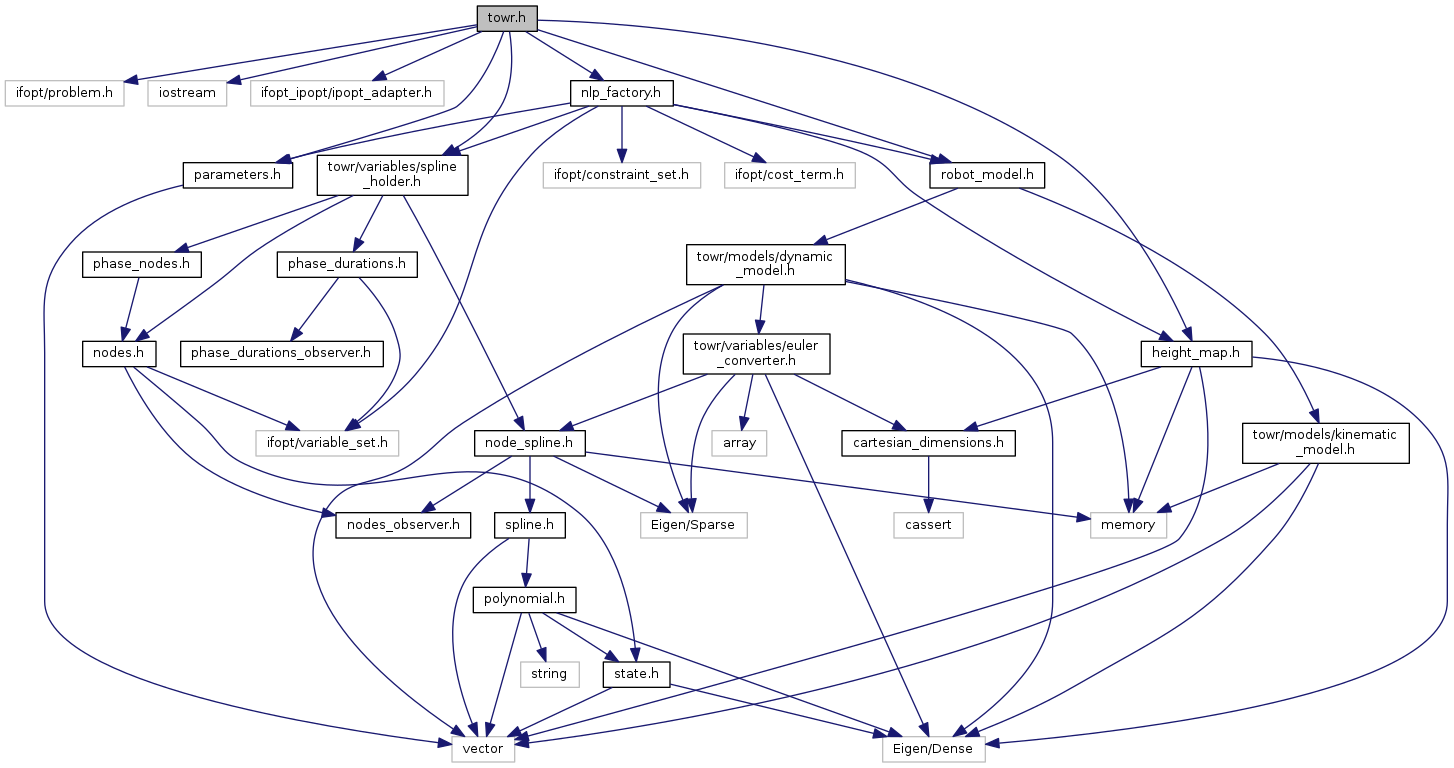
#include <ifopt/problem.h>#include <iostream>#include <ifopt_ipopt/ipopt_adapter.h>#include <towr/variables/spline_holder.h>#include "robot_model.h"#include "height_map.h"#include "nlp_factory.h"#include "parameters.h"
Include dependency graph for towr.h:
Go to the source code of this file.
Classes | |
| class | towr::TOWR |
| TOWR - Trajectory Optimizer for Walking Robots. More... | |
Namespaces | |
| towr | |