Position and velocity of nodes used to generate a Hermite spline. More...
#include <nodes_variables.h>
Classes | |
| struct | NodeValueInfo |
| Semantic information associated with a scalar node value. More... | |
Public Types | |
| using | ObserverPtr = NodesObserver * |
| using | Ptr = std::shared_ptr< NodesVariables > |
| enum | Side { Start =0, End } |
| using | VecDurations = std::vector< double > |
 Public Types inherited from ifopt::Component Public Types inherited from ifopt::Component | |
| typedef Eigen::SparseMatrix< double, Eigen::RowMajor > | Jacobian |
| typedef std::shared_ptr< Component > | Ptr |
| typedef std::vector< Bounds > | VecBound |
| typedef Eigen::VectorXd | VectorXd |
Public Member Functions | |
| void | AddFinalBound (Dx deriv, const std::vector< int > &dimensions, const VectorXd &val) |
| Restricts the last node in the spline. More... | |
| void | AddObserver (ObserverPtr const spline) |
| Adds a dependent observer that gets notified when the nodes change. More... | |
| void | AddStartBound (Dx deriv, const std::vector< int > &dimensions, const VectorXd &val) |
| Restricts the first node in the spline. More... | |
| const std::vector< Node > | GetBoundaryNodes (int poly_id) const |
| VecBound | GetBounds () const override |
| int | GetDim () const |
| const std::vector< Node > | GetNodes () const |
| virtual std::vector< NodeValueInfo > | GetNodeValuesInfo (int opt_idx) const =0 |
| Node values affected by one specific optimization variable. More... | |
| int | GetOptIndex (const NodeValueInfo &nvi) const |
| Index in the optimization vector for a specific nodes' pos/vel. More... | |
| int | GetPolynomialCount () const |
| VectorXd | GetValues () const override |
| Pure optimization variables that define the nodes. More... | |
| void | SetByLinearInterpolation (const VectorXd &initial_val, const VectorXd &final_val, double t_total) |
| Sets nodes pos/vel equally spaced from initial to final position. More... | |
| void | SetVariables (const VectorXd &x) override |
| Sets some node positions and velocity from the optimization variables. More... | |
| Public Member Functions inherited from ifopt::VariableSet | |
| Jacobian | GetJacobian () const final |
| VariableSet (int n_var, const std::string &name) | |
| virtual | ~VariableSet ()=default |
| Public Member Functions inherited from ifopt::Component | |
| Component (int num_rows, const std::string &name) | |
| std::string | GetName () const |
| int | GetRows () const |
| virtual void | Print (double tolerance, int &index_start) const |
| void | SetRows (int num_rows) |
| virtual | ~Component ()=default |
Static Public Member Functions | |
| static int | GetNodeId (int poly_id, Side side) |
| The node ID that belongs to a specific side of a specific polynomial. More... | |
Static Public Attributes | |
| static const int | NodeValueNotOptimized = -1 |
| Static Public Attributes inherited from ifopt::Component | |
| static const int | kSpecifyLater |
Protected Member Functions | |
| NodesVariables (const std::string &variable_name) | |
| virtual | ~NodesVariables ()=default |
Protected Attributes | |
| VecBound | bounds_ |
| the bounds on the node values. More... | |
| int | n_dim_ |
| std::vector< Node > | nodes_ |
Private Member Functions | |
| void | AddBound (const NodeValueInfo &node_info, double value) |
| Restricts a specific optimization variables. More... | |
| void | AddBounds (int node_id, Dx deriv, const std::vector< int > &dim, const VectorXd &values) |
| Bounds a specific node variables. More... | |
| void | UpdateObservers () const |
| Notifies the subscribed observers that the node values changes. More... | |
Private Attributes | |
| std::vector< ObserverPtr > | observers_ |
Detailed Description
Position and velocity of nodes used to generate a Hermite spline.
Four nodes defining a single spline (e.g. foot position in x-direction)
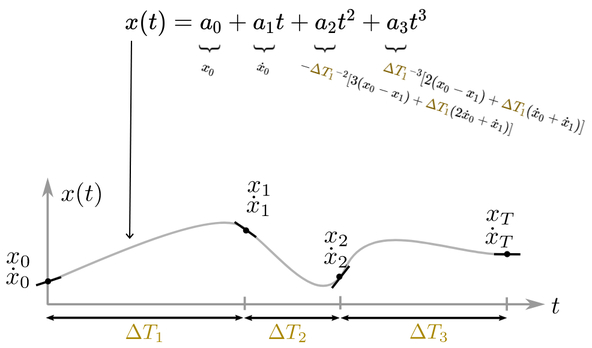
Instead of setting the polynomial coefficients directly, a third-order polynomial is also fully defined by the value and first-derivative of the start and end of the polynomial as well as the duration. This class holds these node values composed of position and velocity.
In the above image the nodes are defined by the scalar position and velocity values x0, x0d, ..., xT, xTd. By optimizing over these nodes, different spline shapes are generated. It is important to note that not all node values must be optimized over. We can fix specific node values in advance, or one optimization variables can represent multiple nodes values in the spline. This is exploited in the subclass NodesVariablesPhaseBased using Phase-based End-effector Parameterization.
Definition at line 71 of file nodes_variables.h.
Member Typedef Documentation
Definition at line 75 of file nodes_variables.h.
| using towr::NodesVariables::Ptr = std::shared_ptr<NodesVariables> |
Definition at line 73 of file nodes_variables.h.
| using towr::NodesVariables::VecDurations = std::vector<double> |
Definition at line 74 of file nodes_variables.h.
Member Enumeration Documentation
| Enumerator | |
|---|---|
| Start | |
| End | |
Definition at line 159 of file nodes_variables.h.
Constructor & Destructor Documentation
|
protected |
- Parameters
-
n_dim The number of dimensions (x,y,..) each node has. variable_name The name of the variables in the optimization problem.
Definition at line 35 of file nodes_variables.cc.
|
protectedvirtualdefault |
Member Function Documentation
|
private |
Restricts a specific optimization variables.
- Parameters
-
node_info The specs of the optimization variables to restrict. value The value to set the bounds to.
Definition at line 162 of file nodes_variables.cc.
|
private |
Bounds a specific node variables.
- Parameters
-
node_id The ID of the node to bound. deriv The derivative of the node to set. dim The dimension of the node to bound. values The values to set the bounds to.
Definition at line 153 of file nodes_variables.cc.
| void towr::NodesVariables::AddFinalBound | ( | Dx | deriv, |
| const std::vector< int > & | dimensions, | ||
| const VectorXd & | val | ||
| ) |
Restricts the last node in the spline.
- Parameters
-
deriv Which derivative (pos,vel,...) should be restricted. dimensions Which dimensions (x,y,z) should be restricted. val The values the last node should be set to.
Definition at line 177 of file nodes_variables.cc.
| void towr::NodesVariables::AddObserver | ( | ObserverPtr const | spline | ) |
Adds a dependent observer that gets notified when the nodes change.
- Parameters
-
spline Usually a pointer to a spline which uses the node values.
Definition at line 82 of file nodes_variables.cc.
| void towr::NodesVariables::AddStartBound | ( | Dx | deriv, |
| const std::vector< int > & | dimensions, | ||
| const VectorXd & | val | ||
| ) |
Restricts the first node in the spline.
- Parameters
-
deriv Which derivative (pos,vel,...) should be restricted. dimensions Which dimensions (x,y,z) should be restricted. val The values the fist node should be set to.
Definition at line 171 of file nodes_variables.cc.
| const std::vector< Node > towr::NodesVariables::GetBoundaryNodes | ( | int | poly_id | ) | const |
- Returns
- the two nodes that make up polynomial with "poly_id".
Definition at line 94 of file nodes_variables.cc.
|
overridevirtual |
- Returns
- the bounds on position and velocity of each node and dimension.
Implements ifopt::Component.
Definition at line 115 of file nodes_variables.cc.
| int towr::NodesVariables::GetDim | ( | ) | const |
- Returns
- The dimensions (x,y,z) of every node.
Definition at line 103 of file nodes_variables.cc.
|
static |
The node ID that belongs to a specific side of a specific polynomial.
- Parameters
-
poly_id The ID of the polynomial within the spline. side The side from which the node ID is required.
Definition at line 88 of file nodes_variables.cc.
| const std::vector< Node > towr::NodesVariables::GetNodes | ( | ) | const |
- Returns
- All the nodes that can be used to reconstruct the spline.
Definition at line 121 of file nodes_variables.cc.
|
pure virtual |
Node values affected by one specific optimization variable.
- Parameters
-
opt_idx The index (=row) of the optimization variable.
- Returns
- All node values affected by this optimization variable.
This function determines which node values are optimized over, and which nodes values are set by the same optimization variable.
Reverse of GetOptIndex().
Implemented in towr::NodesVariablesPhaseBased, and towr::NodesVariablesAll.
| int towr::NodesVariables::GetOptIndex | ( | const NodeValueInfo & | nvi | ) | const |
Index in the optimization vector for a specific nodes' pos/vel.
- Parameters
-
nvi Description of node value we want to know the index for.
- Returns
- The position of this node value in the optimization variables.
Reverse of GetNodeInfoAtOptIndex().
Definition at line 41 of file nodes_variables.cc.
| int towr::NodesVariables::GetPolynomialCount | ( | ) | const |
- Returns
- the number of polynomials that can be built with these nodes.
Definition at line 109 of file nodes_variables.cc.
|
overridevirtual |
Pure optimization variables that define the nodes.
Not all node position and velocities are independent or optimized over, so usually the number of optimization variables is less than all nodes' pos/vel.
- See also
- GetNodeInfoAtOptIndex()
Implements ifopt::Component.
Definition at line 53 of file nodes_variables.cc.
| void towr::NodesVariables::SetByLinearInterpolation | ( | const VectorXd & | initial_val, |
| const VectorXd & | final_val, | ||
| double | t_total | ||
| ) |
Sets nodes pos/vel equally spaced from initial to final position.
- Parameters
-
initial_val value of the first node. final_val value of the final node. t_total The total duration to reach final node (to set velocities).
Definition at line 127 of file nodes_variables.cc.
|
overridevirtual |
Sets some node positions and velocity from the optimization variables.
- Parameters
-
x The optimization variables.
Not all node position and velocities are independent or optimized over, so usually the number of optimization variables is less than all nodes pos/vel.
- See also
- GetNodeValuesInfo()
Implements ifopt::Component.
Definition at line 65 of file nodes_variables.cc.
|
private |
Notifies the subscribed observers that the node values changes.
Definition at line 75 of file nodes_variables.cc.
Member Data Documentation
|
protected |
the bounds on the node values.
Definition at line 214 of file nodes_variables.h.
|
protected |
Definition at line 216 of file nodes_variables.h.
|
protected |
Definition at line 215 of file nodes_variables.h.
|
static |
Definition at line 115 of file nodes_variables.h.
|
private |
Definition at line 223 of file nodes_variables.h.
The documentation for this class was generated from the following files: