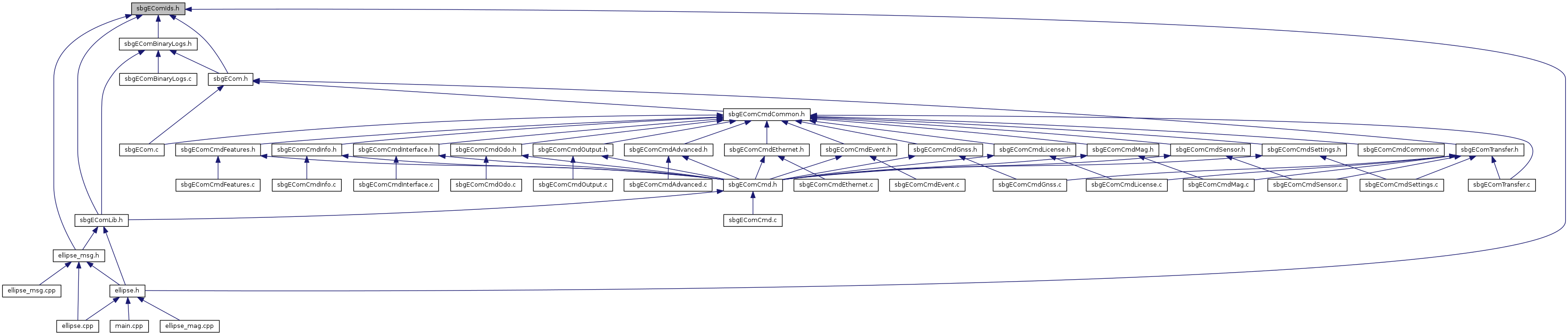
Defines all sbgECom commands identifiers. More...
Go to the source code of this file.
Classes | |
| union | _SbgEComUnifiedId |
Macros | |
| #define | SBG_ECOM_BUILD_ID(classId, logId) (((uint16)classId << 8) | (uint8)logId) |
Typedefs | |
| typedef enum _SbgEComClass | SbgEComClass |
| typedef enum _SbgEComCmd | SbgEComCmd |
| typedef uint16 | SbgEComCmdId |
| typedef enum _SbgEComIdNmea1Log | SbgEComIdNmea1Log |
| typedef enum _SbgEComIdThirdParty | SbgEComIdThirdParty |
| typedef enum _SbgEComLog | SbgEComLog |
| typedef enum _SbgEComLog1MsgId | SbgEComLog1 |
| typedef uint8 | SbgEComMsgId |
| typedef enum _SbgEComNmeaLog | SbgEComNmeaLog |
| typedef union _SbgEComUnifiedId | SbgEComUnifiedId |
Functions | |
| SBG_INLINE bool | sbgEComBinaryLogIsCmdValid (uint16 cmdId) |
| SBG_INLINE bool | sbgEComMsgClassIsALog (SbgEComClass msgClass) |
Detailed Description
Defines all sbgECom commands identifiers.
- Date
- 25 February 2013
Copyright Notice
Copyright (C) 2007-2013, SBG Systems SAS. All rights reserved.
This source code is intended for use only by SBG Systems SAS and those that have explicit written permission to use it from SBG Systems SAS.
THIS CODE AND INFORMATION IS PROVIDED "AS IS" WITHOUT WARRANTY OF ANY KIND, EITHER EXPRESSED OR IMPLIED, INCLUDING BUT NOT LIMITED TO THE IMPLIED WARRANTIES OF MERCHANTABILITY AND/OR FITNESS FOR A PARTICULAR PURPOSE.
Definition in file sbgEComIds.h.
Macro Definition Documentation
Helper macro to build an id with its class
Definition at line 37 of file sbgEComIds.h.
Typedef Documentation
| typedef enum _SbgEComClass SbgEComClass |
Enum that defines all the message classes available.
| typedef enum _SbgEComCmd SbgEComCmd |
Enum that defines all the available commands for the sbgECom library.
| typedef uint16 SbgEComCmdId |
Redefine SbgEComCmdId as a simple 16-bit unsigned integer. The Id now has to be built using SBG_ECOM_BUILD_ID macro to build an ID with its associated class.
Definition at line 272 of file sbgEComIds.h.
| typedef enum _SbgEComIdNmea1Log SbgEComIdNmea1Log |
Enum that defines all the available Proprietary Nmea output logs from the sbgECom library.
| typedef enum _SbgEComIdThirdParty SbgEComIdThirdParty |
Enum that defines all the available Proprietary output logs from the sbgECom library.
| typedef enum _SbgEComLog SbgEComLog |
Enum that defines all the available ECom output logs from the sbgECom library.
| typedef enum _SbgEComLog1MsgId SbgEComLog1 |
Enum that defines all the available ECom output logs in the class SBG_ECOM_CLASS_LOG_ECOM_1
| typedef uint8 SbgEComMsgId |
This type defines any message identifier. Because message identifiers enum will be different with each class id, we use a generic uint8 rather than an enum.
Definition at line 278 of file sbgEComIds.h.
| typedef enum _SbgEComNmeaLog SbgEComNmeaLog |
Enum that defines all the available Nmea output logs from the sbgECom library.
| typedef union _SbgEComUnifiedId SbgEComUnifiedId |
Define an unified message id that holds all IDs of all classes
Enumeration Type Documentation
| enum _SbgEComClass |
Enum that defines all the message classes available.
Definition at line 46 of file sbgEComIds.h.
| enum _SbgEComCmd |
Enum that defines all the available commands for the sbgECom library.
Definition at line 180 of file sbgEComIds.h.
| enum _SbgEComIdNmea1Log |
Enum that defines all the available Proprietary Nmea output logs from the sbgECom library.
Definition at line 145 of file sbgEComIds.h.
| enum _SbgEComIdThirdParty |
Enum that defines all the available Proprietary output logs from the sbgECom library.
Definition at line 163 of file sbgEComIds.h.
| enum _SbgEComLog |
Enum that defines all the available ECom output logs from the sbgECom library.
Definition at line 68 of file sbgEComIds.h.
| enum _SbgEComLog1MsgId |
Enum that defines all the available ECom output logs in the class SBG_ECOM_CLASS_LOG_ECOM_1
| Enumerator | |
|---|---|
| SBG_ECOM_LOG_FAST_IMU_DATA |
Provides accelerometers, gyroscopes, time and status at 1KHz rate. |
| SBG_ECOM_LOG_ECOM_1_NUM_MESSAGES |
Helper definition to know the number of ECom messages |
Definition at line 120 of file sbgEComIds.h.
| enum _SbgEComNmeaLog |
Enum that defines all the available Nmea output logs from the sbgECom library.
Definition at line 129 of file sbgEComIds.h.
Function Documentation
| SBG_INLINE bool sbgEComBinaryLogIsCmdValid | ( | uint16 | cmdId | ) |
Test if the command is a binary log one.
- Parameters
-
[in] cmdId The command id to test.
- Returns
- TRUE if the command id corresponds to a binary log.
Definition at line 310 of file sbgEComIds.h.
| SBG_INLINE bool sbgEComMsgClassIsALog | ( | SbgEComClass | msgClass | ) |
Test if the message class is a binary log one.
- Parameters
-
[in] cmdId The command id to test.
- Returns
- TRUE if the command id corresponds to a binary log.
Definition at line 289 of file sbgEComIds.h.