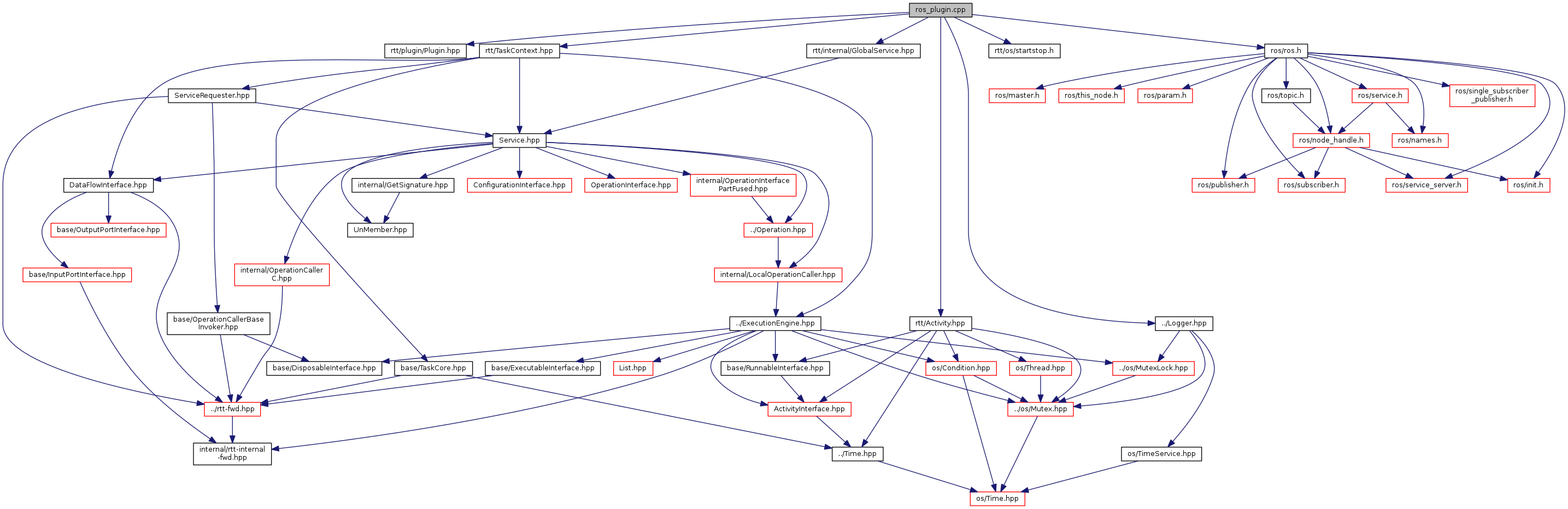
#include <rtt/plugin/Plugin.hpp>#include <rtt/TaskContext.hpp>#include <rtt/Activity.hpp>#include <rtt/internal/GlobalService.hpp>#include <rtt/Logger.hpp>#include <rtt/os/startstop.h>#include <ros/ros.h>
Include dependency graph for ros_plugin.cpp:
Go to the source code of this file.
Functions | |
| std::string | getRTTPluginName () |
| std::string | getRTTTargetName () |
| static void | loadROSService () |
| bool | loadRTTPlugin (RTT::TaskContext *c) |
Function Documentation
| std::string getRTTPluginName | ( | ) |
Definition at line 96 of file ros_plugin.cpp.
| std::string getRTTTargetName | ( | ) |
Definition at line 100 of file ros_plugin.cpp.
|
static |
Definition at line 39 of file ros_plugin.cpp.
| bool loadRTTPlugin | ( | RTT::TaskContext * | c | ) |
Definition at line 50 of file ros_plugin.cpp.