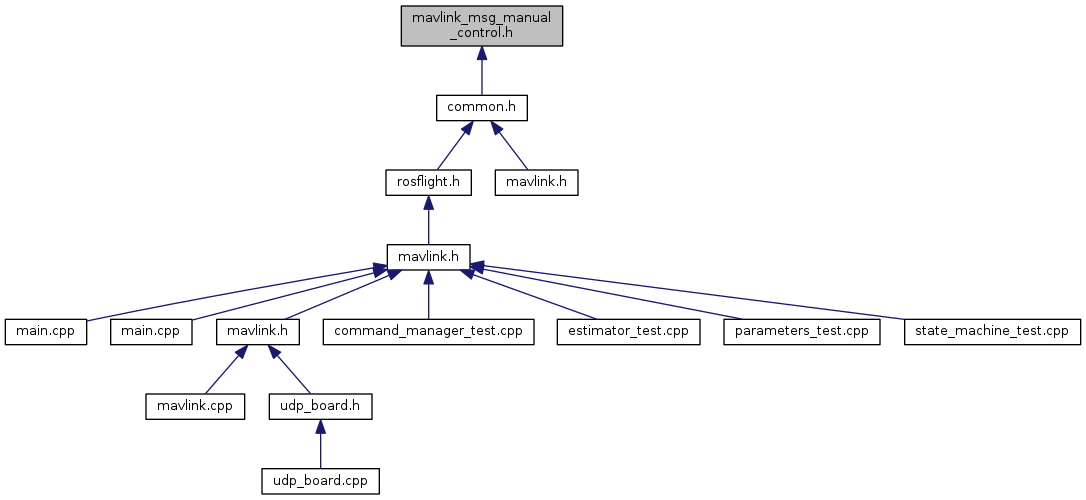
Go to the source code of this file.
Classes | |
| struct | __mavlink_manual_control_t |
Macros | |
| #define | MAVLINK_MESSAGE_INFO_MANUAL_CONTROL |
| #define | MAVLINK_MSG_ID_69_CRC 243 |
| #define | MAVLINK_MSG_ID_69_LEN 11 |
| #define | MAVLINK_MSG_ID_MANUAL_CONTROL 69 |
| #define | MAVLINK_MSG_ID_MANUAL_CONTROL_CRC 243 |
| #define | MAVLINK_MSG_ID_MANUAL_CONTROL_LEN 11 |
Typedefs | |
| typedef struct __mavlink_manual_control_t | mavlink_manual_control_t |
Functions | |
| static void | mavlink_msg_manual_control_decode (const mavlink_message_t *msg, mavlink_manual_control_t *manual_control) |
| Decode a manual_control message into a struct. More... | |
| static uint16_t | mavlink_msg_manual_control_encode (uint8_t system_id, uint8_t component_id, mavlink_message_t *msg, const mavlink_manual_control_t *manual_control) |
| Encode a manual_control struct. More... | |
| static uint16_t | mavlink_msg_manual_control_encode_chan (uint8_t system_id, uint8_t component_id, uint8_t chan, mavlink_message_t *msg, const mavlink_manual_control_t *manual_control) |
| Encode a manual_control struct on a channel. More... | |
| static uint16_t | mavlink_msg_manual_control_get_buttons (const mavlink_message_t *msg) |
| Get field buttons from manual_control message. More... | |
| static int16_t | mavlink_msg_manual_control_get_r (const mavlink_message_t *msg) |
| Get field r from manual_control message. More... | |
| static uint8_t | mavlink_msg_manual_control_get_target (const mavlink_message_t *msg) |
| Send a manual_control message. More... | |
| static int16_t | mavlink_msg_manual_control_get_x (const mavlink_message_t *msg) |
| Get field x from manual_control message. More... | |
| static int16_t | mavlink_msg_manual_control_get_y (const mavlink_message_t *msg) |
| Get field y from manual_control message. More... | |
| static int16_t | mavlink_msg_manual_control_get_z (const mavlink_message_t *msg) |
| Get field z from manual_control message. More... | |
| static uint16_t | mavlink_msg_manual_control_pack (uint8_t system_id, uint8_t component_id, mavlink_message_t *msg, uint8_t target, int16_t x, int16_t y, int16_t z, int16_t r, uint16_t buttons) |
| Pack a manual_control message. More... | |
| static uint16_t | mavlink_msg_manual_control_pack_chan (uint8_t system_id, uint8_t component_id, uint8_t chan, mavlink_message_t *msg, uint8_t target, int16_t x, int16_t y, int16_t z, int16_t r, uint16_t buttons) |
| Pack a manual_control message on a channel. More... | |
Macro Definition Documentation
| #define MAVLINK_MESSAGE_INFO_MANUAL_CONTROL |
Definition at line 23 of file mavlink_msg_manual_control.h.
| #define MAVLINK_MSG_ID_69_CRC 243 |
Definition at line 19 of file mavlink_msg_manual_control.h.
| #define MAVLINK_MSG_ID_69_LEN 11 |
Definition at line 16 of file mavlink_msg_manual_control.h.
| #define MAVLINK_MSG_ID_MANUAL_CONTROL 69 |
Definition at line 3 of file mavlink_msg_manual_control.h.
| #define MAVLINK_MSG_ID_MANUAL_CONTROL_CRC 243 |
Definition at line 18 of file mavlink_msg_manual_control.h.
| #define MAVLINK_MSG_ID_MANUAL_CONTROL_LEN 11 |
Definition at line 15 of file mavlink_msg_manual_control.h.
Typedef Documentation
| typedef struct __mavlink_manual_control_t mavlink_manual_control_t |
Function Documentation
|
inlinestatic |
Decode a manual_control message into a struct.
- Parameters
-
msg The message to decode manual_control C-struct to decode the message contents into
Definition at line 317 of file mavlink_msg_manual_control.h.
|
inlinestatic |
Encode a manual_control struct.
- Parameters
-
system_id ID of this system component_id ID of this component (e.g. 200 for IMU) msg The MAVLink message to compress the data into manual_control C-struct to read the message contents from
Definition at line 139 of file mavlink_msg_manual_control.h.
|
inlinestatic |
Encode a manual_control struct on a channel.
- Parameters
-
system_id ID of this system component_id ID of this component (e.g. 200 for IMU) chan The MAVLink channel this message will be sent over msg The MAVLink message to compress the data into manual_control C-struct to read the message contents from
Definition at line 153 of file mavlink_msg_manual_control.h.
|
inlinestatic |
Get field buttons from manual_control message.
- Returns
- A bitfield corresponding to the joystick buttons' current state, 1 for pressed, 0 for released. The lowest bit corresponds to Button 1.
Definition at line 306 of file mavlink_msg_manual_control.h.
|
inlinestatic |
Get field r from manual_control message.
- Returns
- R-axis, normalized to the range [-1000,1000]. A value of INT16_MAX indicates that this axis is invalid. Generally corresponds to a twisting of the joystick, with counter-clockwise being 1000 and clockwise being -1000, and the yaw of a vehicle.
Definition at line 296 of file mavlink_msg_manual_control.h.
|
inlinestatic |
Send a manual_control message.
- Parameters
-
chan MAVLink channel to send the message target The system to be controlled. x X-axis, normalized to the range [-1000,1000]. A value of INT16_MAX indicates that this axis is invalid. Generally corresponds to forward(1000)-backward(-1000) movement on a joystick and the pitch of a vehicle. y Y-axis, normalized to the range [-1000,1000]. A value of INT16_MAX indicates that this axis is invalid. Generally corresponds to left(-1000)-right(1000) movement on a joystick and the roll of a vehicle. z Z-axis, normalized to the range [-1000,1000]. A value of INT16_MAX indicates that this axis is invalid. Generally corresponds to a separate slider movement with maximum being 1000 and minimum being -1000 on a joystick and the thrust of a vehicle. Positive values are positive thrust, negative values are negative thrust. r R-axis, normalized to the range [-1000,1000]. A value of INT16_MAX indicates that this axis is invalid. Generally corresponds to a twisting of the joystick, with counter-clockwise being 1000 and clockwise being -1000, and the yaw of a vehicle. buttons A bitfield corresponding to the joystick buttons' current state, 1 for pressed, 0 for released. The lowest bit corresponds to Button 1. Get field target from manual_control message
- Returns
- The system to be controlled.
Definition at line 256 of file mavlink_msg_manual_control.h.
|
inlinestatic |
Get field x from manual_control message.
- Returns
- X-axis, normalized to the range [-1000,1000]. A value of INT16_MAX indicates that this axis is invalid. Generally corresponds to forward(1000)-backward(-1000) movement on a joystick and the pitch of a vehicle.
Definition at line 266 of file mavlink_msg_manual_control.h.
|
inlinestatic |
Get field y from manual_control message.
- Returns
- Y-axis, normalized to the range [-1000,1000]. A value of INT16_MAX indicates that this axis is invalid. Generally corresponds to left(-1000)-right(1000) movement on a joystick and the roll of a vehicle.
Definition at line 276 of file mavlink_msg_manual_control.h.
|
inlinestatic |
Get field z from manual_control message.
- Returns
- Z-axis, normalized to the range [-1000,1000]. A value of INT16_MAX indicates that this axis is invalid. Generally corresponds to a separate slider movement with maximum being 1000 and minimum being -1000 on a joystick and the thrust of a vehicle. Positive values are positive thrust, negative values are negative thrust.
Definition at line 286 of file mavlink_msg_manual_control.h.
|
inlinestatic |
Pack a manual_control message.
- Parameters
-
system_id ID of this system component_id ID of this component (e.g. 200 for IMU) msg The MAVLink message to compress the data into target The system to be controlled. x X-axis, normalized to the range [-1000,1000]. A value of INT16_MAX indicates that this axis is invalid. Generally corresponds to forward(1000)-backward(-1000) movement on a joystick and the pitch of a vehicle. y Y-axis, normalized to the range [-1000,1000]. A value of INT16_MAX indicates that this axis is invalid. Generally corresponds to left(-1000)-right(1000) movement on a joystick and the roll of a vehicle. z Z-axis, normalized to the range [-1000,1000]. A value of INT16_MAX indicates that this axis is invalid. Generally corresponds to a separate slider movement with maximum being 1000 and minimum being -1000 on a joystick and the thrust of a vehicle. Positive values are positive thrust, negative values are negative thrust. r R-axis, normalized to the range [-1000,1000]. A value of INT16_MAX indicates that this axis is invalid. Generally corresponds to a twisting of the joystick, with counter-clockwise being 1000 and clockwise being -1000, and the yaw of a vehicle. buttons A bitfield corresponding to the joystick buttons' current state, 1 for pressed, 0 for released. The lowest bit corresponds to Button 1.
- Returns
- length of the message in bytes (excluding serial stream start sign)
Definition at line 50 of file mavlink_msg_manual_control.h.
|
inlinestatic |
Pack a manual_control message on a channel.
- Parameters
-
system_id ID of this system component_id ID of this component (e.g. 200 for IMU) chan The MAVLink channel this message will be sent over msg The MAVLink message to compress the data into target The system to be controlled. x X-axis, normalized to the range [-1000,1000]. A value of INT16_MAX indicates that this axis is invalid. Generally corresponds to forward(1000)-backward(-1000) movement on a joystick and the pitch of a vehicle. y Y-axis, normalized to the range [-1000,1000]. A value of INT16_MAX indicates that this axis is invalid. Generally corresponds to left(-1000)-right(1000) movement on a joystick and the roll of a vehicle. z Z-axis, normalized to the range [-1000,1000]. A value of INT16_MAX indicates that this axis is invalid. Generally corresponds to a separate slider movement with maximum being 1000 and minimum being -1000 on a joystick and the thrust of a vehicle. Positive values are positive thrust, negative values are negative thrust. r R-axis, normalized to the range [-1000,1000]. A value of INT16_MAX indicates that this axis is invalid. Generally corresponds to a twisting of the joystick, with counter-clockwise being 1000 and clockwise being -1000, and the yaw of a vehicle. buttons A bitfield corresponding to the joystick buttons' current state, 1 for pressed, 0 for released. The lowest bit corresponds to Button 1.
- Returns
- length of the message in bytes (excluding serial stream start sign)
Definition at line 97 of file mavlink_msg_manual_control.h.