#include "common.h"#include "rosflight.h"#include "test_board.h"#include "mavlink.h"#include "cmath"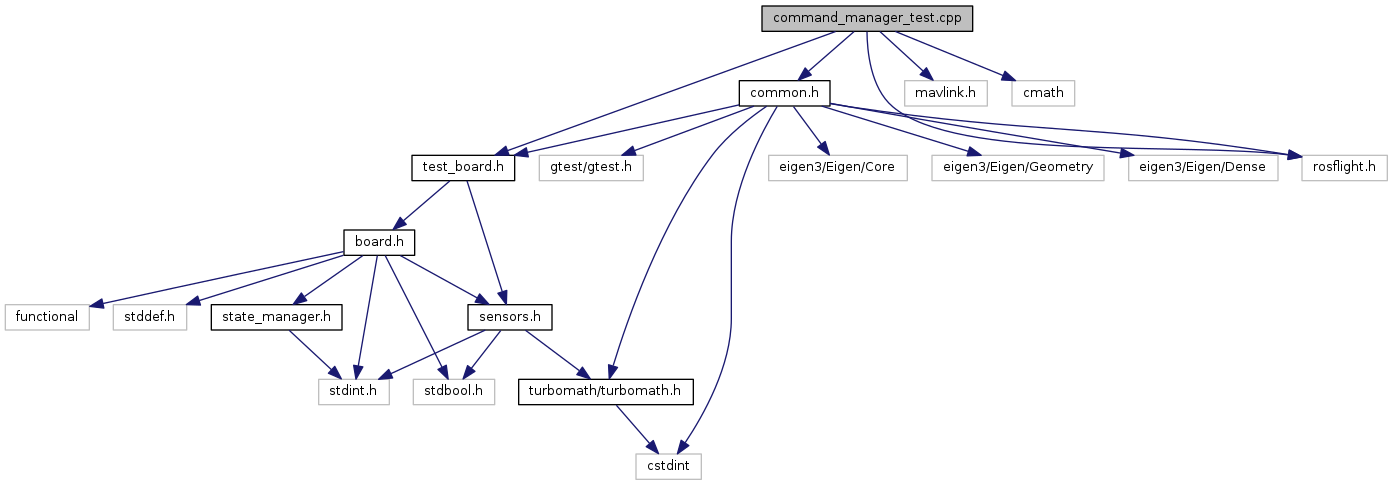
Go to the source code of this file.
Macros | |
| #define | CHN_HIGH 1900 |
| #define | CHN_LOW 1100 |
| #define | OFFBOARD_F 0.9 |
| #define | OFFBOARD_X -1.0 |
| #define | OFFBOARD_Y 0.5 |
| #define | OFFBOARD_Z -0.7 |
| #define | RC_X ((RC_X_PWM - 1500)/500.0 * rf.params_.get_param_float(PARAM_RC_MAX_ROLL)) |
| #define | RC_X_PWM 1800 |
Functions | |
| TEST (command_manager_test, rc) | |
| TEST (command_manager_test, rc_arm_disarm) | |
| TEST (command_manager_test, rc_failsafe_test) | |
| TEST (command_manager_test, rc_offboard_muxing_test) | |
| TEST (command_manager_test, partial_muxing_test) | |
Macro Definition Documentation
| #define CHN_HIGH 1900 |
Definition at line 8 of file command_manager_test.cpp.
| #define CHN_LOW 1100 |
Definition at line 7 of file command_manager_test.cpp.
| #define OFFBOARD_F 0.9 |
Definition at line 380 of file command_manager_test.cpp.
| #define OFFBOARD_X -1.0 |
Definition at line 377 of file command_manager_test.cpp.
| #define OFFBOARD_Y 0.5 |
Definition at line 378 of file command_manager_test.cpp.
| #define OFFBOARD_Z -0.7 |
Definition at line 379 of file command_manager_test.cpp.
| #define RC_X ((RC_X_PWM - 1500)/500.0 * rf.params_.get_param_float(PARAM_RC_MAX_ROLL)) |
Definition at line 383 of file command_manager_test.cpp.
| #define RC_X_PWM 1800 |
Definition at line 382 of file command_manager_test.cpp.
Function Documentation
| TEST | ( | command_manager_test | , |
| rc | |||
| ) |
Definition at line 13 of file command_manager_test.cpp.
| TEST | ( | command_manager_test | , |
| rc_arm_disarm | |||
| ) |
Definition at line 71 of file command_manager_test.cpp.
| TEST | ( | command_manager_test | , |
| rc_failsafe_test | |||
| ) |
Definition at line 245 of file command_manager_test.cpp.
| TEST | ( | command_manager_test | , |
| rc_offboard_muxing_test | |||
| ) |
Definition at line 385 of file command_manager_test.cpp.
| TEST | ( | command_manager_test | , |
| partial_muxing_test | |||
| ) |
Definition at line 590 of file command_manager_test.cpp.