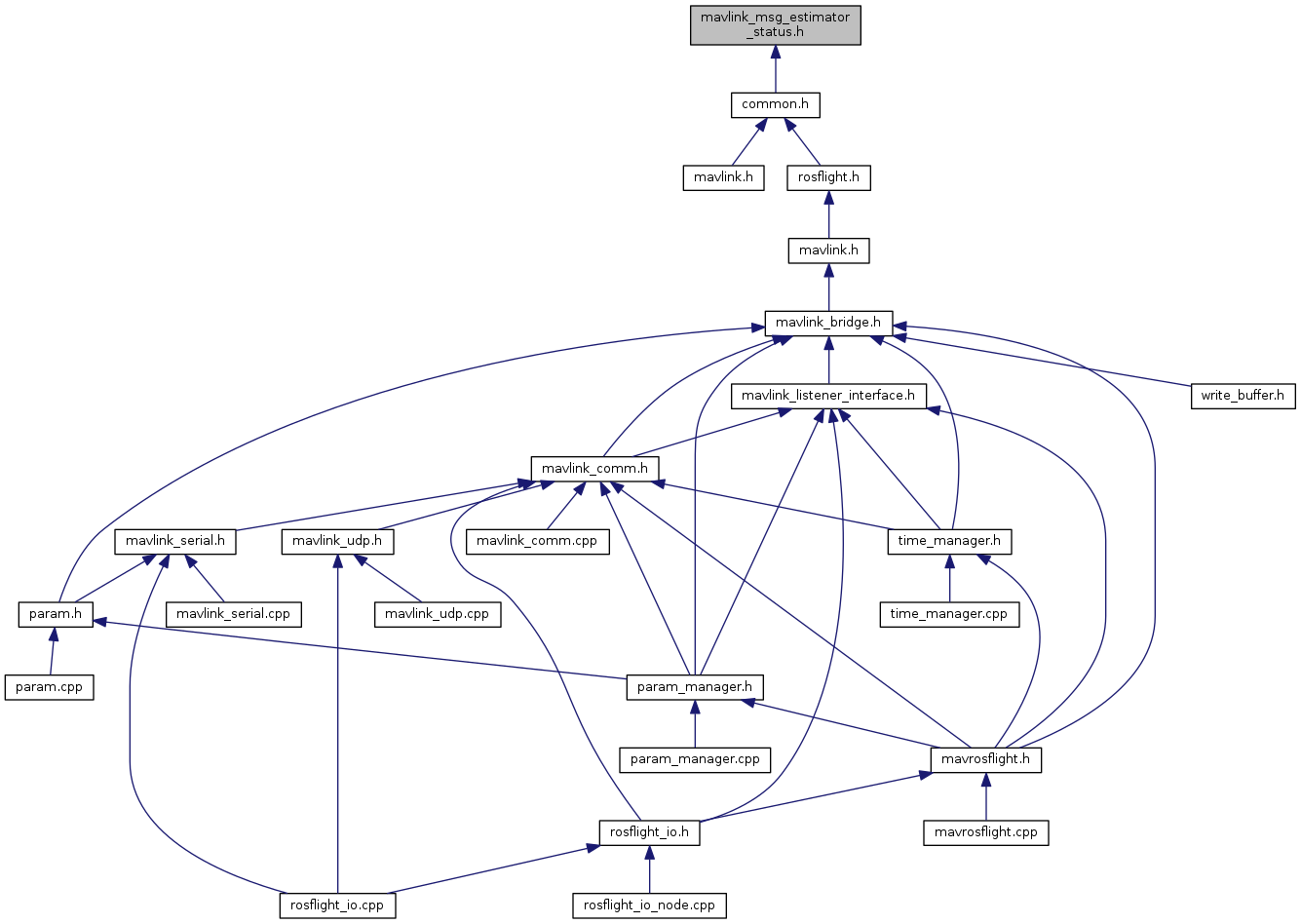
Go to the source code of this file.
Classes | |
| struct | __mavlink_estimator_status_t |
Macros | |
| #define | MAVLINK_MESSAGE_INFO_ESTIMATOR_STATUS |
| #define | MAVLINK_MSG_ID_230_CRC 163 |
| #define | MAVLINK_MSG_ID_230_LEN 42 |
| #define | MAVLINK_MSG_ID_ESTIMATOR_STATUS 230 |
| #define | MAVLINK_MSG_ID_ESTIMATOR_STATUS_CRC 163 |
| #define | MAVLINK_MSG_ID_ESTIMATOR_STATUS_LEN 42 |
Typedefs | |
| typedef struct __mavlink_estimator_status_t | mavlink_estimator_status_t |
Functions | |
| static void | mavlink_msg_estimator_status_decode (const mavlink_message_t *msg, mavlink_estimator_status_t *estimator_status) |
| Decode a estimator_status message into a struct. More... | |
| static uint16_t | mavlink_msg_estimator_status_encode (uint8_t system_id, uint8_t component_id, mavlink_message_t *msg, const mavlink_estimator_status_t *estimator_status) |
| Encode a estimator_status struct. More... | |
| static uint16_t | mavlink_msg_estimator_status_encode_chan (uint8_t system_id, uint8_t component_id, uint8_t chan, mavlink_message_t *msg, const mavlink_estimator_status_t *estimator_status) |
| Encode a estimator_status struct on a channel. More... | |
| static uint16_t | mavlink_msg_estimator_status_get_flags (const mavlink_message_t *msg) |
| Get field flags from estimator_status message. More... | |
| static float | mavlink_msg_estimator_status_get_hagl_ratio (const mavlink_message_t *msg) |
| Get field hagl_ratio from estimator_status message. More... | |
| static float | mavlink_msg_estimator_status_get_mag_ratio (const mavlink_message_t *msg) |
| Get field mag_ratio from estimator_status message. More... | |
| static float | mavlink_msg_estimator_status_get_pos_horiz_accuracy (const mavlink_message_t *msg) |
| Get field pos_horiz_accuracy from estimator_status message. More... | |
| static float | mavlink_msg_estimator_status_get_pos_horiz_ratio (const mavlink_message_t *msg) |
| Get field pos_horiz_ratio from estimator_status message. More... | |
| static float | mavlink_msg_estimator_status_get_pos_vert_accuracy (const mavlink_message_t *msg) |
| Get field pos_vert_accuracy from estimator_status message. More... | |
| static float | mavlink_msg_estimator_status_get_pos_vert_ratio (const mavlink_message_t *msg) |
| Get field pos_vert_ratio from estimator_status message. More... | |
| static float | mavlink_msg_estimator_status_get_tas_ratio (const mavlink_message_t *msg) |
| Get field tas_ratio from estimator_status message. More... | |
| static uint64_t | mavlink_msg_estimator_status_get_time_usec (const mavlink_message_t *msg) |
| Send a estimator_status message. More... | |
| static float | mavlink_msg_estimator_status_get_vel_ratio (const mavlink_message_t *msg) |
| Get field vel_ratio from estimator_status message. More... | |
| static uint16_t | mavlink_msg_estimator_status_pack (uint8_t system_id, uint8_t component_id, mavlink_message_t *msg, uint64_t time_usec, uint16_t flags, float vel_ratio, float pos_horiz_ratio, float pos_vert_ratio, float mag_ratio, float hagl_ratio, float tas_ratio, float pos_horiz_accuracy, float pos_vert_accuracy) |
| Pack a estimator_status message. More... | |
| static uint16_t | mavlink_msg_estimator_status_pack_chan (uint8_t system_id, uint8_t component_id, uint8_t chan, mavlink_message_t *msg, uint64_t time_usec, uint16_t flags, float vel_ratio, float pos_horiz_ratio, float pos_vert_ratio, float mag_ratio, float hagl_ratio, float tas_ratio, float pos_horiz_accuracy, float pos_vert_accuracy) |
| Pack a estimator_status message on a channel. More... | |
Macro Definition Documentation
| #define MAVLINK_MESSAGE_INFO_ESTIMATOR_STATUS |
Definition at line 27 of file mavlink_msg_estimator_status.h.
| #define MAVLINK_MSG_ID_230_CRC 163 |
Definition at line 23 of file mavlink_msg_estimator_status.h.
| #define MAVLINK_MSG_ID_230_LEN 42 |
Definition at line 20 of file mavlink_msg_estimator_status.h.
| #define MAVLINK_MSG_ID_ESTIMATOR_STATUS 230 |
Definition at line 3 of file mavlink_msg_estimator_status.h.
| #define MAVLINK_MSG_ID_ESTIMATOR_STATUS_CRC 163 |
Definition at line 22 of file mavlink_msg_estimator_status.h.
| #define MAVLINK_MSG_ID_ESTIMATOR_STATUS_LEN 42 |
Definition at line 19 of file mavlink_msg_estimator_status.h.
Typedef Documentation
| typedef struct __mavlink_estimator_status_t mavlink_estimator_status_t |
Function Documentation
|
inlinestatic |
Decode a estimator_status message into a struct.
- Parameters
-
msg The message to decode estimator_status C-struct to decode the message contents into
Definition at line 409 of file mavlink_msg_estimator_status.h.
|
inlinestatic |
Encode a estimator_status struct.
- Parameters
-
system_id ID of this system component_id ID of this component (e.g. 200 for IMU) msg The MAVLink message to compress the data into estimator_status C-struct to read the message contents from
Definition at line 171 of file mavlink_msg_estimator_status.h.
|
inlinestatic |
Encode a estimator_status struct on a channel.
- Parameters
-
system_id ID of this system component_id ID of this component (e.g. 200 for IMU) chan The MAVLink channel this message will be sent over msg The MAVLink message to compress the data into estimator_status C-struct to read the message contents from
Definition at line 185 of file mavlink_msg_estimator_status.h.
|
inlinestatic |
Get field flags from estimator_status message.
- Returns
- Integer bitmask indicating which EKF outputs are valid. See definition for ESTIMATOR_STATUS_FLAGS.
Definition at line 318 of file mavlink_msg_estimator_status.h.
|
inlinestatic |
Get field hagl_ratio from estimator_status message.
- Returns
- Height above terrain innovation test ratio
Definition at line 368 of file mavlink_msg_estimator_status.h.
|
inlinestatic |
Get field mag_ratio from estimator_status message.
- Returns
- Magnetometer innovation test ratio
Definition at line 358 of file mavlink_msg_estimator_status.h.
|
inlinestatic |
Get field pos_horiz_accuracy from estimator_status message.
- Returns
- Horizontal position 1-STD accuracy relative to the EKF local origin (m)
Definition at line 388 of file mavlink_msg_estimator_status.h.
|
inlinestatic |
Get field pos_horiz_ratio from estimator_status message.
- Returns
- Horizontal position innovation test ratio
Definition at line 338 of file mavlink_msg_estimator_status.h.
|
inlinestatic |
Get field pos_vert_accuracy from estimator_status message.
- Returns
- Vertical position 1-STD accuracy relative to the EKF local origin (m)
Definition at line 398 of file mavlink_msg_estimator_status.h.
|
inlinestatic |
Get field pos_vert_ratio from estimator_status message.
- Returns
- Vertical position innovation test ratio
Definition at line 348 of file mavlink_msg_estimator_status.h.
|
inlinestatic |
Get field tas_ratio from estimator_status message.
- Returns
- True airspeed innovation test ratio
Definition at line 378 of file mavlink_msg_estimator_status.h.
|
inlinestatic |
Send a estimator_status message.
- Parameters
-
chan MAVLink channel to send the message time_usec Timestamp (micros since boot or Unix epoch) flags Integer bitmask indicating which EKF outputs are valid. See definition for ESTIMATOR_STATUS_FLAGS. vel_ratio Velocity innovation test ratio pos_horiz_ratio Horizontal position innovation test ratio pos_vert_ratio Vertical position innovation test ratio mag_ratio Magnetometer innovation test ratio hagl_ratio Height above terrain innovation test ratio tas_ratio True airspeed innovation test ratio pos_horiz_accuracy Horizontal position 1-STD accuracy relative to the EKF local origin (m) pos_vert_accuracy Vertical position 1-STD accuracy relative to the EKF local origin (m) Get field time_usec from estimator_status message
- Returns
- Timestamp (micros since boot or Unix epoch)
Definition at line 308 of file mavlink_msg_estimator_status.h.
|
inlinestatic |
Get field vel_ratio from estimator_status message.
- Returns
- Velocity innovation test ratio
Definition at line 328 of file mavlink_msg_estimator_status.h.
|
inlinestatic |
Pack a estimator_status message.
- Parameters
-
system_id ID of this system component_id ID of this component (e.g. 200 for IMU) msg The MAVLink message to compress the data into time_usec Timestamp (micros since boot or Unix epoch) flags Integer bitmask indicating which EKF outputs are valid. See definition for ESTIMATOR_STATUS_FLAGS. vel_ratio Velocity innovation test ratio pos_horiz_ratio Horizontal position innovation test ratio pos_vert_ratio Vertical position innovation test ratio mag_ratio Magnetometer innovation test ratio hagl_ratio Height above terrain innovation test ratio tas_ratio True airspeed innovation test ratio pos_horiz_accuracy Horizontal position 1-STD accuracy relative to the EKF local origin (m) pos_vert_accuracy Vertical position 1-STD accuracy relative to the EKF local origin (m)
- Returns
- length of the message in bytes (excluding serial stream start sign)
Definition at line 62 of file mavlink_msg_estimator_status.h.
|
inlinestatic |
Pack a estimator_status message on a channel.
- Parameters
-
system_id ID of this system component_id ID of this component (e.g. 200 for IMU) chan The MAVLink channel this message will be sent over msg The MAVLink message to compress the data into time_usec Timestamp (micros since boot or Unix epoch) flags Integer bitmask indicating which EKF outputs are valid. See definition for ESTIMATOR_STATUS_FLAGS. vel_ratio Velocity innovation test ratio pos_horiz_ratio Horizontal position innovation test ratio pos_vert_ratio Vertical position innovation test ratio mag_ratio Magnetometer innovation test ratio hagl_ratio Height above terrain innovation test ratio tas_ratio True airspeed innovation test ratio pos_horiz_accuracy Horizontal position 1-STD accuracy relative to the EKF local origin (m) pos_vert_accuracy Vertical position 1-STD accuracy relative to the EKF local origin (m)
- Returns
- length of the message in bytes (excluding serial stream start sign)
Definition at line 121 of file mavlink_msg_estimator_status.h.