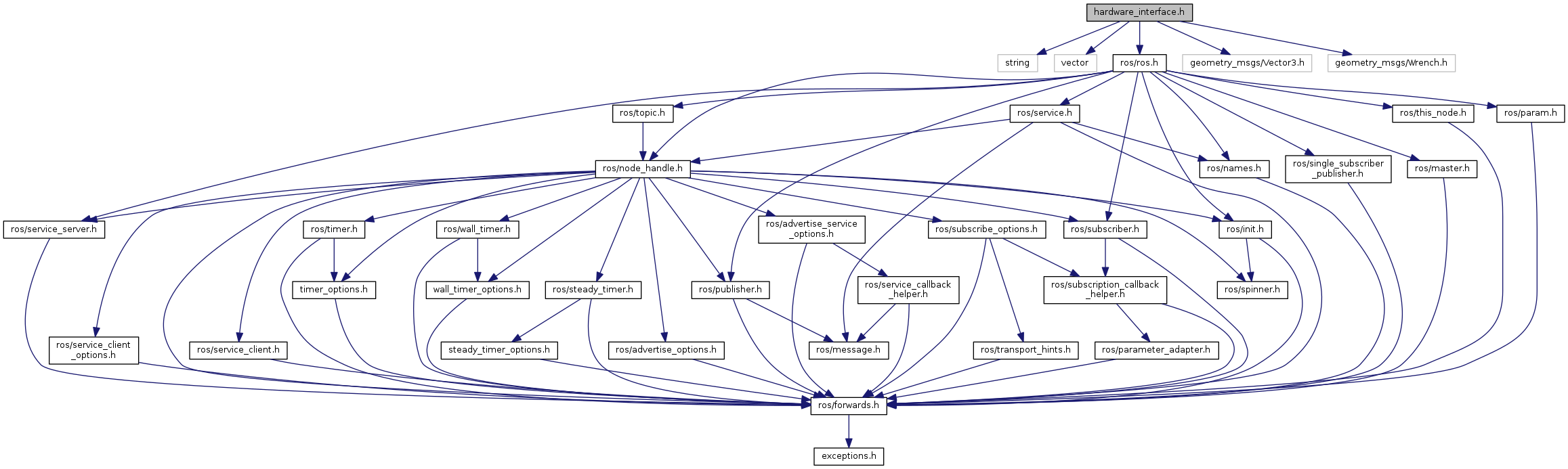
#include <string>#include <vector>#include <ros/ros.h>#include <geometry_msgs/Vector3.h>#include <geometry_msgs/Wrench.h>
Include dependency graph for hardware_interface.h:
Go to the source code of this file.
Namespaces | |
| pr2_hardware_interface | |
Typedefs | |
| typedef std::map< std::string, Accelerometer * > | pr2_hardware_interface::AccelerometerMap |
| typedef std::map< std::string, Actuator * > | pr2_hardware_interface::ActuatorMap |
| typedef std::map< std::string, AnalogIn * > | pr2_hardware_interface::AnalogInMap |
| typedef std::map< std::string, CustomHW * > | pr2_hardware_interface::CustomHWMap |
| typedef std::map< std::string, DigitalOut * > | pr2_hardware_interface::DigitalOutMap |
| typedef std::map< std::string, ForceTorque * > | pr2_hardware_interface::ForceTorqueMap |
| typedef std::map< std::string, PressureSensor * > | pr2_hardware_interface::PressureSensorMap |
| typedef std::map< std::string, Projector * > | pr2_hardware_interface::ProjectorMap |