PublisherNew class. More...
#include <coil/Task.h>#include <coil/Mutex.h>#include <coil/Condition.h>#include <coil/PeriodicTask.h>#include <rtm/RTC.h>#include <rtm/PublisherBase.h>#include <rtm/CdrBufferBase.h>#include <rtm/DataPortStatus.h>#include <rtm/SystemLogger.h>#include <rtm/ConnectorBase.h>#include <rtm/ConnectorListener.h>
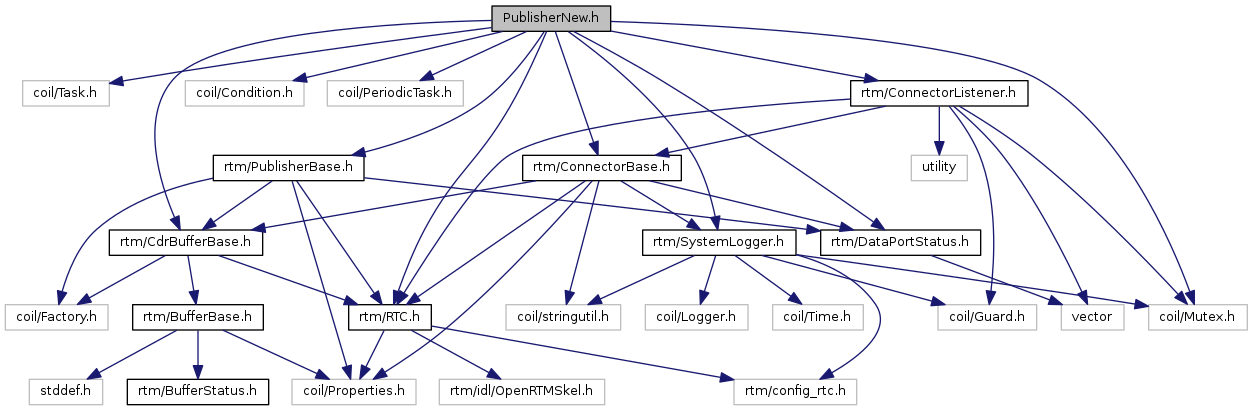
Include dependency graph for PublisherNew.h:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Classes | |
| class | RTC::PublisherNew |
| PublisherNew class. More... | |
Namespaces | |
| coil | |
| Common Object Interface Layer. | |
| RTC | |
| RT-Component. | |
Functions | |
| void DLL_EXPORT | PublisherNewInit () |
Detailed Description
PublisherNew class.
- Date
- Date
- 2007-12-31 03:08:06
Copyright (C) 2006-2010 Noriaki Ando Task-intelligence Research Group, Intelligent Systems Research Institute, National Institute of Advanced Industrial Science and Technology (AIST), Japan All rights reserved.
- Id
- PublisherNew.h 1971 2010-06-03 08:46:40Z n-ando
Definition in file PublisherNew.h.
Function Documentation
| void DLL_EXPORT PublisherNewInit | ( | ) |
Definition at line 579 of file PublisherNew.cpp.