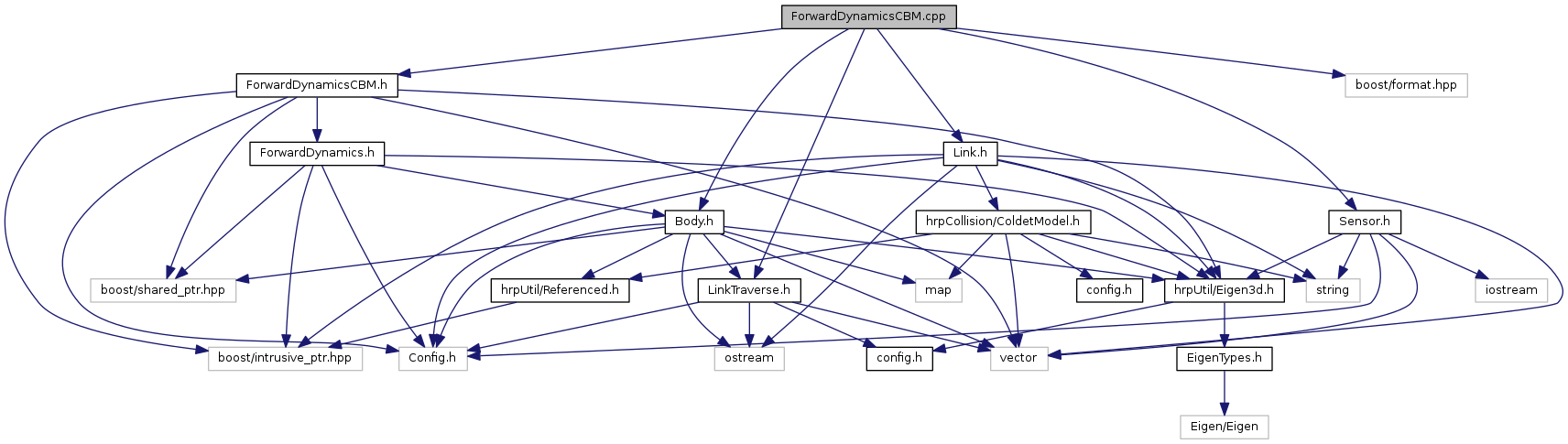
#include "Body.h"
#include "Link.h"
#include "LinkTraverse.h"
#include "Sensor.h"
#include "ForwardDynamicsCBM.h"
#include <boost/format.hpp>
Go to the source code of this file.
- Author
- Shin'ichiro Nakaoka
Definition in file ForwardDynamicsCBM.cpp.
template<class TMatrix >
| static void putMatrix |
( |
TMatrix & |
M, |
|
|
char * |
name |
|
) |
| |
|
static |
template<class TVector >
| static void putVector |
( |
TVector & |
M, |
|
|
char * |
name |
|
) |
| |
|
static |
| const bool CALC_ALL_JOINT_TORQUES = false |
|
static |
| const bool debugMode = false |
|
static |
| const bool ROOT_ATT_NORMALIZATION_ENABLED = false |
|
static |