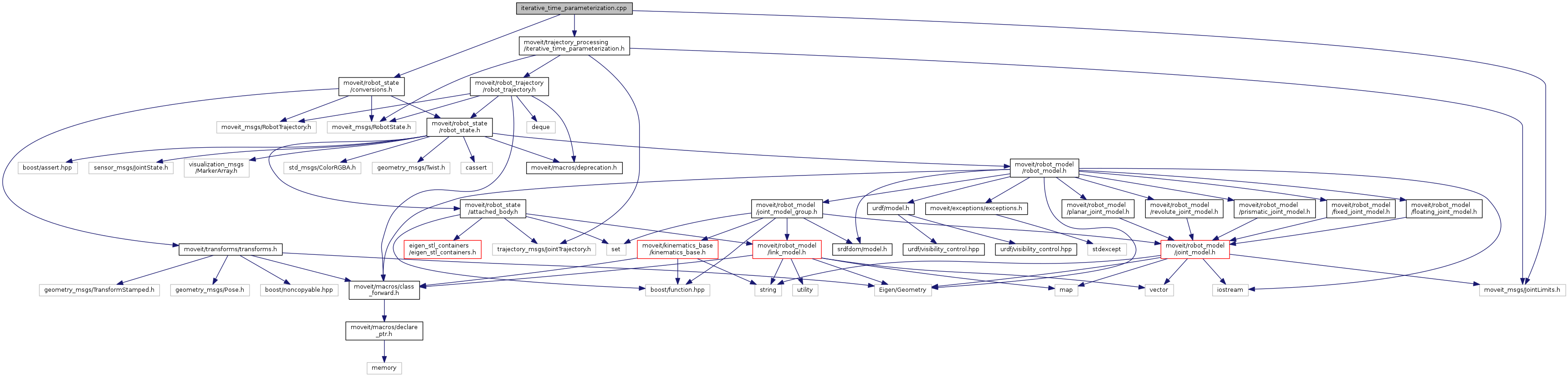
#include <moveit/trajectory_processing/iterative_time_parameterization.h>#include <moveit_msgs/JointLimits.h>#include <moveit/robot_state/conversions.h>
Include dependency graph for iterative_time_parameterization.cpp:
Go to the source code of this file.
Namespaces | |
| trajectory_processing | |
Variables | |
| static const double | trajectory_processing::DEFAULT_ACCEL_MAX = 1.0 |
| static const double | trajectory_processing::DEFAULT_VEL_MAX = 1.0 |
| static const double | trajectory_processing::ROUNDING_THRESHOLD = 0.01 |