Controller that publishes the state of all joints in a robot. More...
#include <joint_state_controller.h>
Private Member Functions | |
| void | addExtraJoints (const ros::NodeHandle &nh, sensor_msgs::JointState &msg) |
Private Attributes | |
| std::vector< hardware_interface::JointStateHandle > | joint_state_ |
| ros::Time | last_publish_time_ |
| unsigned int | num_hw_joints_ |
| Number of joints present in the JointStateInterface, excluding extra joints. More... | |
| double | publish_rate_ |
| boost::shared_ptr< realtime_tools::RealtimePublisher< sensor_msgs::JointState > > | realtime_pub_ |
Additional Inherited Members | |
 Public Types inherited from controller_interface::ControllerBase Public Types inherited from controller_interface::ControllerBase | |
| typedef std::vector< hardware_interface::InterfaceResources > | ClaimedResources |
| Public Attributes inherited from controller_interface::ControllerBase | |
| CONSTRUCTED | |
| INITIALIZED | |
| RUNNING | |
| enum controller_interface::ControllerBase:: { ... } | state_ |
| Protected Member Functions inherited from controller_interface::Controller< hardware_interface::JointStateInterface > | |
| std::string | getHardwareInterfaceType () const |
| virtual bool | initRequest (hardware_interface::RobotHW *robot_hw, ros::NodeHandle &root_nh, ros::NodeHandle &controller_nh, ClaimedResources &claimed_resources) |
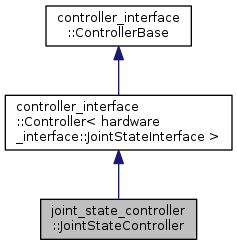
Detailed Description
Controller that publishes the state of all joints in a robot.
This controller publishes the state of all resources registered to a hardware_interface::JointStateInterface to a topic of type sensor_msgs/JointState. The following is a basic configuration of the controller.
It's possible to optionally specify a set of extra joints not contained in a hardware_interface::JointStateInterface with custom (and static) default values. The following is an example configuration specifying extra joints.
An unspecified position, velocity or acceleration defaults to zero.
Definition at line 79 of file joint_state_controller.h.
Constructor & Destructor Documentation
|
inline |
Definition at line 82 of file joint_state_controller.h.
Member Function Documentation
|
private |
Definition at line 105 of file joint_state_controller.cpp.
|
virtual |
Reimplemented from controller_interface::Controller< hardware_interface::JointStateInterface >.
Definition at line 40 of file joint_state_controller.cpp.
|
virtual |
Reimplemented from controller_interface::ControllerBase.
Definition at line 72 of file joint_state_controller.cpp.
|
virtual |
Reimplemented from controller_interface::ControllerBase.
Definition at line 102 of file joint_state_controller.cpp.
|
virtual |
Implements controller_interface::ControllerBase.
Definition at line 78 of file joint_state_controller.cpp.
Member Data Documentation
|
private |
Definition at line 92 of file joint_state_controller.h.
|
private |
Definition at line 94 of file joint_state_controller.h.
|
private |
Number of joints present in the JointStateInterface, excluding extra joints.
Definition at line 96 of file joint_state_controller.h.
|
private |
Definition at line 95 of file joint_state_controller.h.
|
private |
Definition at line 93 of file joint_state_controller.h.
The documentation for this class was generated from the following files: