#include <ros/ros.h>#include <costmap_2d/costmap_2d.h>#include <geometry_msgs/PoseStamped.h>#include <geometry_msgs/Point.h>#include <nav_msgs/Path.h>#include <tf/transform_datatypes.h>#include <vector>#include <nav_core/base_global_planner.h>#include <nav_msgs/GetPlan.h>#include <dynamic_reconfigure/server.h>#include <global_planner/potential_calculator.h>#include <global_planner/expander.h>#include <global_planner/traceback.h>#include <global_planner/orientation_filter.h>#include <global_planner/GlobalPlannerConfig.h>
Include dependency graph for planner_core.h:

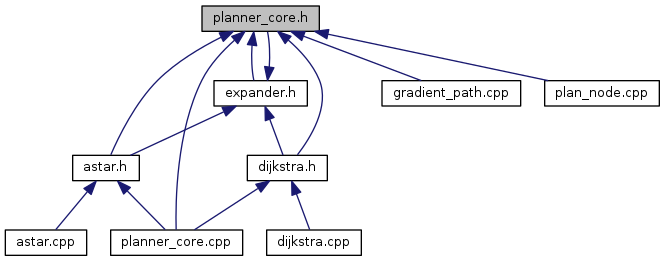
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | global_planner::GlobalPlanner |
Namespaces | |
| global_planner | |
Macros | |
| #define | POT_HIGH 1.0e10 |
Macro Definition Documentation
| #define POT_HIGH 1.0e10 |
Definition at line 40 of file planner_core.h.