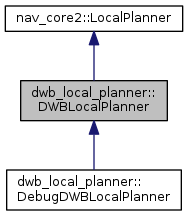
Plugin-based flexible local_planner.
More...
#include <dwb_local_planner.h>
|
| nav_2d_msgs::Twist2DStamped | computeVelocityCommands (const nav_2d_msgs::Pose2DStamped &pose, const nav_2d_msgs::Twist2D &velocity) override |
| | nav_core2 computeVelocityCommands - calculates the best command given the current pose and velocity More...
|
| |
| virtual nav_2d_msgs::Twist2DStamped | computeVelocityCommands (const nav_2d_msgs::Pose2DStamped &pose, const nav_2d_msgs::Twist2D &velocity, std::shared_ptr< dwb_msgs::LocalPlanEvaluation > &results) |
| | Compute the best command given the current pose and velocity, with possible debug information. More...
|
| |
| | DWBLocalPlanner () |
| | Constructor that brings up pluginlib loaders. More...
|
| |
| void | initialize (const ros::NodeHandle &parent, const std::string &name, TFListenerPtr tf, nav_core2::Costmap::Ptr costmap) override |
| | nav_core2 initialization More...
|
| |
| bool | isGoalReached (const nav_2d_msgs::Pose2DStamped &pose, const nav_2d_msgs::Twist2D &velocity) override |
| | nav_core2 isGoalReached - Check whether the robot has reached its goal, given the current pose & velocity. More...
|
| |
| virtual dwb_msgs::TrajectoryScore | scoreTrajectory (const dwb_msgs::Trajectory2D &traj, double best_score=-1) |
| | Score a given command. Can be used for testing. More...
|
| |
| void | setGoalPose (const nav_2d_msgs::Pose2DStamped &goal_pose) override |
| | nav_core2 setGoalPose - Sets the global goal pose More...
|
| |
| void | setPlan (const nav_2d_msgs::Path2D &path) override |
| | nav_core2 setPlan - Sets the global plan More...
|
| |
| virtual | ~DWBLocalPlanner () |
| |
| virtual | ~LocalPlanner () |
| |
|
| virtual dwb_msgs::TrajectoryScore | coreScoringAlgorithm (const geometry_msgs::Pose2D &pose, const nav_2d_msgs::Twist2D velocity, std::shared_ptr< dwb_msgs::LocalPlanEvaluation > &results) |
| | Iterate through all the twists and find the best one. More...
|
| |
| virtual void | loadCritics (const std::string name) |
| | Load the critic parameters from the namespace. More...
|
| |
| virtual void | prepare (const nav_2d_msgs::Pose2DStamped &pose, const nav_2d_msgs::Twist2D &velocity) |
| | Helper method for preparing for the core scoring algorithm. More...
|
| |
| std::string | resolveCriticClassName (std::string base_name) |
| | try to resolve a possibly shortened critic name with the default namespaces and the suffix "Critic" More...
|
| |
| virtual nav_2d_msgs::Path2D | transformGlobalPlan (const nav_2d_msgs::Pose2DStamped &pose) |
| | Transforms global plan into same frame as pose, clips far away poses and possibly prunes passed poses. More...
|
| |
| geometry_msgs::Pose2D | transformPoseToLocal (const nav_2d_msgs::Pose2DStamped &pose) |
| | Helper method to transform a given pose to the local costmap frame. More...
|
| |
Plugin-based flexible local_planner.
Definition at line 54 of file dwb_local_planner.h.
| dwb_local_planner::DWBLocalPlanner::DWBLocalPlanner |
( |
| ) |
|
| virtual dwb_local_planner::DWBLocalPlanner::~DWBLocalPlanner |
( |
| ) |
|
|
inlinevirtual |
| nav_2d_msgs::Twist2DStamped dwb_local_planner::DWBLocalPlanner::computeVelocityCommands |
( |
const nav_2d_msgs::Pose2DStamped & |
pose, |
|
|
const nav_2d_msgs::Twist2D & |
velocity |
|
) |
| |
|
overridevirtual |
nav_core2 computeVelocityCommands - calculates the best command given the current pose and velocity
It is presumed that the global plan is already set.
This is mostly a wrapper for the protected computeVelocityCommands function which has additional debugging info.
- Parameters
-
| pose | Current robot pose |
| velocity | Current robot velocity |
- Returns
- The best command for the robot to drive
Implements nav_core2::LocalPlanner.
Definition at line 178 of file dwb_local_planner.cpp.
| nav_2d_msgs::Twist2DStamped dwb_local_planner::DWBLocalPlanner::computeVelocityCommands |
( |
const nav_2d_msgs::Pose2DStamped & |
pose, |
|
|
const nav_2d_msgs::Twist2D & |
velocity, |
|
|
std::shared_ptr< dwb_msgs::LocalPlanEvaluation > & |
results |
|
) |
| |
|
virtual |
Compute the best command given the current pose and velocity, with possible debug information.
Same as above computeVelocityCommands, but with debug results. If the results pointer is not null, additional information about the twists evaluated will be in results after the call.
- Parameters
-
| pose | Current robot pose |
| velocity | Current robot velocity |
| results | Output param, if not null, will be filled in with full evaluation results |
- Returns
- Best command
Definition at line 227 of file dwb_local_planner.cpp.
| dwb_msgs::TrajectoryScore dwb_local_planner::DWBLocalPlanner::coreScoringAlgorithm |
( |
const geometry_msgs::Pose2D & |
pose, |
|
|
const nav_2d_msgs::Twist2D |
velocity, |
|
|
std::shared_ptr< dwb_msgs::LocalPlanEvaluation > & |
results |
|
) |
| |
|
protectedvirtual |
| bool dwb_local_planner::DWBLocalPlanner::isGoalReached |
( |
const nav_2d_msgs::Pose2DStamped & |
pose, |
|
|
const nav_2d_msgs::Twist2D & |
velocity |
|
) |
| |
|
overridevirtual |
nav_core2 isGoalReached - Check whether the robot has reached its goal, given the current pose & velocity.
The pose that it checks against is the last pose in the current global plan. The calculation is delegated to the goal_checker plugin.
- Parameters
-
| pose | Current pose |
| velocity | Current velocity |
- Returns
- True if the robot should be considered as having reached the goal.
Implements nav_core2::LocalPlanner.
Definition at line 141 of file dwb_local_planner.cpp.
| void dwb_local_planner::DWBLocalPlanner::loadCritics |
( |
const std::string |
name | ) |
|
|
protectedvirtual |
Load the critic parameters from the namespace.
- Parameters
-
| name | The namespace of this planner. |
Definition at line 112 of file dwb_local_planner.cpp.
| void dwb_local_planner::DWBLocalPlanner::prepare |
( |
const nav_2d_msgs::Pose2DStamped & |
pose, |
|
|
const nav_2d_msgs::Twist2D & |
velocity |
|
) |
| |
|
protectedvirtual |
Helper method for preparing for the core scoring algorithm.
Runs the prepare method on all the critics with freshly transformed data
Definition at line 200 of file dwb_local_planner.cpp.
| std::string dwb_local_planner::DWBLocalPlanner::resolveCriticClassName |
( |
std::string |
base_name | ) |
|
|
protected |
try to resolve a possibly shortened critic name with the default namespaces and the suffix "Critic"
- Parameters
-
| base_name | The name of the critic as read in from the parameter server |
- Returns
- Our attempted resolution of the name, with namespace prepended and/or the suffix Critic appended
Definition at line 91 of file dwb_local_planner.cpp.
| dwb_msgs::TrajectoryScore dwb_local_planner::DWBLocalPlanner::scoreTrajectory |
( |
const dwb_msgs::Trajectory2D & |
traj, |
|
|
double |
best_score = -1 |
|
) |
| |
|
virtual |
Score a given command. Can be used for testing.
Given a trajectory, calculate the score where lower scores are better. If the given (positive) score exceeds the best_score, calculation may be cut short, as the score can only go up from there.
- Parameters
-
| traj | Trajectory to check |
| best_score | If positive, the threshold for early termination |
- Returns
- The full scoring of the input trajectory
Definition at line 350 of file dwb_local_planner.cpp.
| void dwb_local_planner::DWBLocalPlanner::setGoalPose |
( |
const nav_2d_msgs::Pose2DStamped & |
goal_pose | ) |
|
|
overridevirtual |
| void dwb_local_planner::DWBLocalPlanner::setPlan |
( |
const nav_2d_msgs::Path2D & |
path | ) |
|
|
overridevirtual |
| nav_2d_msgs::Path2D dwb_local_planner::DWBLocalPlanner::transformGlobalPlan |
( |
const nav_2d_msgs::Pose2DStamped & |
pose | ) |
|
|
protectedvirtual |
Transforms global plan into same frame as pose, clips far away poses and possibly prunes passed poses.
Three key operations 1) Transforms global plan into frame of the given pose 2) Only returns poses that are near the robot, i.e. whether they are likely on the local costmap 3) If prune_plan_ is true, it will remove all points that we've already passed from both the transformed plan and the saved global_plan_. Technically, it iterates to a pose on the path that is within prune_distance_ of the robot and erases all poses before that.
Definition at line 389 of file dwb_local_planner.cpp.
| geometry_msgs::Pose2D dwb_local_planner::DWBLocalPlanner::transformPoseToLocal |
( |
const nav_2d_msgs::Pose2DStamped & |
pose | ) |
|
|
protected |
| bool dwb_local_planner::DWBLocalPlanner::debug_trajectory_details_ |
|
protected |
| std::vector<std::string> dwb_local_planner::DWBLocalPlanner::default_critic_namespaces_ |
|
protected |
| nav_2d_msgs::Path2D dwb_local_planner::DWBLocalPlanner::global_plan_ |
|
protected |
| nav_2d_msgs::Pose2DStamped dwb_local_planner::DWBLocalPlanner::goal_pose_ |
|
protected |
| double dwb_local_planner::DWBLocalPlanner::prune_distance_ |
|
protected |
| bool dwb_local_planner::DWBLocalPlanner::prune_plan_ |
|
protected |
| bool dwb_local_planner::DWBLocalPlanner::short_circuit_trajectory_evaluation_ |
|
protected |
| bool dwb_local_planner::DWBLocalPlanner::update_costmap_before_planning_ |
|
protected |
The documentation for this class was generated from the following files:
 Public Member Functions inherited from nav_core2::LocalPlanner
Public Member Functions inherited from nav_core2::LocalPlanner