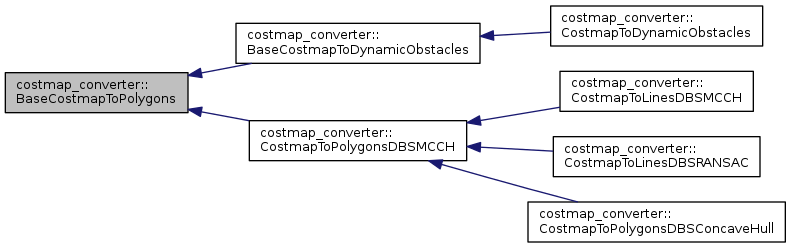
This abstract class defines the interface for plugins that convert the costmap into polygon types. More...
#include <costmap_converter_interface.h>
Public Member Functions | |
| virtual void | compute ()=0 |
| This method performs the actual work (conversion of the costmap to polygons) More... | |
| virtual ObstacleArrayConstPtr | getObstacles () |
| Get a shared instance of the current obstacle container If this method is not overwritten by the underlying plugin, the obstacle container just imports getPolygons(). More... | |
| virtual PolygonContainerConstPtr | getPolygons () |
| Get a shared instance of the current polygon container. More... | |
| virtual void | initialize (ros::NodeHandle nh)=0 |
| Initialize the plugin. More... | |
| virtual void | setCostmap2D (costmap_2d::Costmap2D *costmap)=0 |
| Pass a pointer to the costap to the plugin. More... | |
| virtual void | setOdomTopic (const std::string &odom_topic) |
| Set name of robot's odometry topic. More... | |
| virtual bool | stackedCostmapConversion () |
| Determines whether an additional plugin for subsequent costmap conversion is specified. More... | |
| void | startWorker (ros::Rate rate, costmap_2d::Costmap2D *costmap, bool spin_thread=false) |
Instantiate a worker that repeatedly coverts the most recent costmap to polygons. The worker is implemented as a timer event that is invoked at a specific rate. The passed costmap pointer must be valid at the complete time and must be lockable. By specifying the argument spin_thread the timer event is invoked in a separate thread and callback queue or otherwise it is called from the global callback queue (of the node in which the plugin is used). More... | |
| void | stopWorker () |
| Stop the worker that repeatedly converts the costmap to polygons. More... | |
| virtual void | updateCostmap2D ()=0 |
| Get updated data from the previously set Costmap2D. More... | |
| virtual | ~BaseCostmapToPolygons () |
| Destructor. More... | |
Protected Member Functions | |
| BaseCostmapToPolygons () | |
| Protected constructor that should be called by subclasses. More... | |
| void | spinThread () |
| Blocking method that checks for new timer events (active if startWorker() is called with spin_thread enabled) More... | |
| void | workerCallback (const ros::TimerEvent &) |
| The callback of the worker that performs the actual work (updating the costmap and converting it to polygons) More... | |
Private Attributes | |
| ros::CallbackQueue | callback_queue_ |
| bool | need_to_terminate_ |
| ros::NodeHandle | nh_ |
| boost::thread * | spin_thread_ |
| boost::mutex | terminate_mutex_ |
| ros::Timer | worker_timer_ |
Detailed Description
This abstract class defines the interface for plugins that convert the costmap into polygon types.
Plugins must accept a costmap_2d::Costmap2D datatype as information source. The interface provides two different use cases:
- Manual call to conversion routines: setCostmap2D(), compute() and getPolygons() (in subsequent calls setCostmap2D() can be substituted by updateCostmap2D())
- Repeatedly process costmap with a specific rate (startWorker() and stopWorker()): Make sure that the costmap is valid while the worker is active (you can specify your own spinner or activate a threaded spinner). Costmaps can be obtained by invoking getPolygons().
Definition at line 77 of file costmap_converter_interface.h.
Constructor & Destructor Documentation
|
inlinevirtual |
Destructor.
Definition at line 90 of file costmap_converter_interface.h.
|
inlineprotected |
Protected constructor that should be called by subclasses.
Definition at line 229 of file costmap_converter_interface.h.
Member Function Documentation
|
pure virtual |
This method performs the actual work (conversion of the costmap to polygons)
Implemented in costmap_converter::CostmapToPolygonsDBSMCCH, costmap_converter::CostmapToDynamicObstacles, costmap_converter::CostmapToLinesDBSRANSAC, costmap_converter::CostmapToLinesDBSMCCH, and costmap_converter::CostmapToPolygonsDBSConcaveHull.
|
inlinevirtual |
Get a shared instance of the current obstacle container If this method is not overwritten by the underlying plugin, the obstacle container just imports getPolygons().
- Remarks
- If compute() or startWorker() has not been called before, this method returns an empty instance!
- Warning
- The underlying plugin must ensure that this method is thread safe.
- Returns
- Shared instance of the current obstacle container
- See also
- getPolygons
Reimplemented in costmap_converter::CostmapToDynamicObstacles.
Definition at line 135 of file costmap_converter_interface.h.
|
inlinevirtual |
Get a shared instance of the current polygon container.
If this method is not implemented by any subclass (plugin) the returned shared pointer is empty.
- Remarks
- If compute() or startWorker() has not been called before, this method returns an empty instance!
- Warning
- The underlying plugin must ensure that this method is thread safe.
- Returns
- Shared instance of the current polygon container
Reimplemented in costmap_converter::CostmapToPolygonsDBSMCCH.
Definition at line 125 of file costmap_converter_interface.h.
|
pure virtual |
Initialize the plugin.
- Parameters
-
nh Nodehandle that defines the namespace for parameters
Implemented in costmap_converter::CostmapToPolygonsDBSMCCH, costmap_converter::CostmapToDynamicObstacles, costmap_converter::CostmapToLinesDBSRANSAC, costmap_converter::CostmapToLinesDBSMCCH, and costmap_converter::CostmapToPolygonsDBSConcaveHull.
|
pure virtual |
Pass a pointer to the costap to the plugin.
- Warning
- The plugin should handle the costmap's mutex locking.
- See also
- updateCostmap2D
- Parameters
-
costmap Pointer to the costmap2d source
Implemented in costmap_converter::CostmapToPolygonsDBSMCCH, and costmap_converter::CostmapToDynamicObstacles.
|
inlinevirtual |
Set name of robot's odometry topic.
Some plugins might require odometry information to compensate the robot's ego motion
- Parameters
-
odom_topic topic name
Reimplemented in costmap_converter::CostmapToDynamicObstacles.
Definition at line 157 of file costmap_converter_interface.h.
|
inlineprotected |
Blocking method that checks for new timer events (active if startWorker() is called with spin_thread enabled)
Definition at line 234 of file costmap_converter_interface.h.
|
inlinevirtual |
Determines whether an additional plugin for subsequent costmap conversion is specified.
- Returns
- false, since all plugins for static costmap conversion are independent
Reimplemented in costmap_converter::BaseCostmapToDynamicObstacles.
Definition at line 164 of file costmap_converter_interface.h.
|
inline |
Instantiate a worker that repeatedly coverts the most recent costmap to polygons. The worker is implemented as a timer event that is invoked at a specific rate. The passed costmap pointer must be valid at the complete time and must be lockable. By specifying the argument spin_thread the timer event is invoked in a separate thread and callback queue or otherwise it is called from the global callback queue (of the node in which the plugin is used).
- Parameters
-
rate The rate that specifies how often the costmap should be updated costmap Pointer to the underlying costmap (must be valid and lockable as long as the worker is active spin_thread if true,the timer is invoked in a separate thread, otherwise in the default callback queue)
Definition at line 177 of file costmap_converter_interface.h.
|
inline |
Stop the worker that repeatedly converts the costmap to polygons.
Definition at line 210 of file costmap_converter_interface.h.
|
pure virtual |
Get updated data from the previously set Costmap2D.
- Warning
- The plugin should handle the costmap's mutex locking.
- See also
- setCostmap2D
Implemented in costmap_converter::CostmapToPolygonsDBSMCCH, and costmap_converter::CostmapToDynamicObstacles.
|
inlineprotected |
The callback of the worker that performs the actual work (updating the costmap and converting it to polygons)
Definition at line 250 of file costmap_converter_interface.h.
Member Data Documentation
|
private |
Definition at line 260 of file costmap_converter_interface.h.
|
private |
Definition at line 262 of file costmap_converter_interface.h.
|
private |
Definition at line 258 of file costmap_converter_interface.h.
|
private |
Definition at line 259 of file costmap_converter_interface.h.
|
private |
Definition at line 261 of file costmap_converter_interface.h.
|
private |
Definition at line 257 of file costmap_converter_interface.h.
The documentation for this class was generated from the following file: