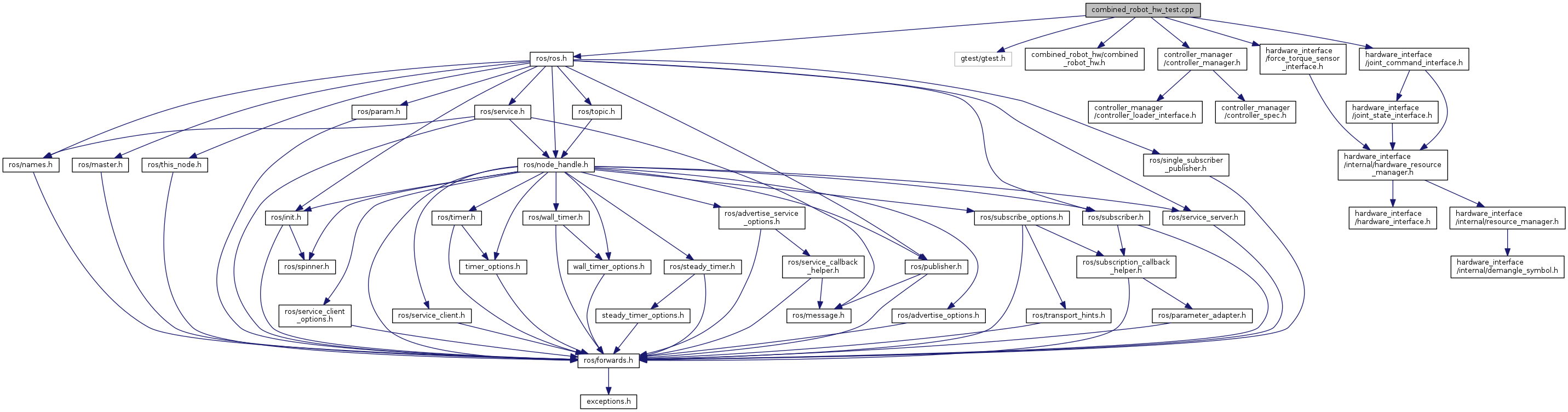
#include <ros/ros.h>#include <gtest/gtest.h>#include <combined_robot_hw/combined_robot_hw.h>#include <controller_manager/controller_manager.h>#include <hardware_interface/joint_command_interface.h>#include <hardware_interface/force_torque_sensor_interface.h>
Include dependency graph for combined_robot_hw_test.cpp:
Go to the source code of this file.
Functions | |
| int | main (int argc, char **argv) |
| TEST (CombinedRobotHWTests, combinationOk) | |
| TEST (CombinedRobotHWTests, switchOk) | |
Function Documentation
| int main | ( | int | argc, |
| char ** | argv | ||
| ) |
Definition at line 198 of file combined_robot_hw_test.cpp.
| TEST | ( | CombinedRobotHWTests | , |
| combinationOk | |||
| ) |
Definition at line 38 of file combined_robot_hw_test.cpp.
| TEST | ( | CombinedRobotHWTests | , |
| switchOk | |||
| ) |
Definition at line 99 of file combined_robot_hw_test.cpp.