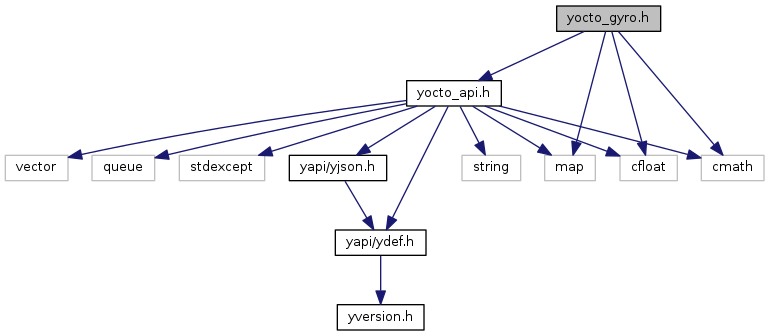
Go to the source code of this file.
Classes | |
| class | YGyro |
| class | YQt |
Macros | |
| #define | Y_BANDWIDTH_INVALID (YAPI_INVALID_INT) |
| #define | Y_XVALUE_INVALID (YAPI_INVALID_DOUBLE) |
| #define | Y_YVALUE_INVALID (YAPI_INVALID_DOUBLE) |
| #define | Y_ZVALUE_INVALID (YAPI_INVALID_DOUBLE) |
Typedefs | |
| typedef void(* | YAnglesCallback) (YGyro *yGyro, double roll, double pitch, double head) |
| typedef void(* | YGyroTimedReportCallback) (YGyro *func, YMeasure measure) |
| typedef void(* | YGyroValueCallback) (YGyro *func, const string &functionValue) |
| typedef void(* | YQtTimedReportCallback) (YQt *func, YMeasure measure) |
| typedef void(* | YQtValueCallback) (YQt *func, const string &functionValue) |
| typedef void(* | YQuatCallback) (YGyro *yGyro, double w, double x, double y, double z) |
Functions | |
| YGyro * | yFindGyro (const string &func) |
| YQt * | yFindQt (const string &func) |
| YGyro * | yFirstGyro (void) |
| YQt * | yFirstQt (void) |
Macro Definition Documentation
| #define Y_BANDWIDTH_INVALID (YAPI_INVALID_INT) |
Definition at line 239 of file yocto_gyro.h.
| #define Y_XVALUE_INVALID (YAPI_INVALID_DOUBLE) |
Definition at line 240 of file yocto_gyro.h.
| #define Y_YVALUE_INVALID (YAPI_INVALID_DOUBLE) |
Definition at line 241 of file yocto_gyro.h.
| #define Y_ZVALUE_INVALID (YAPI_INVALID_DOUBLE) |
Definition at line 242 of file yocto_gyro.h.
Typedef Documentation
| typedef void(* YAnglesCallback) (YGyro *yGyro, double roll, double pitch, double head) |
Definition at line 246 of file yocto_gyro.h.
Definition at line 238 of file yocto_gyro.h.
| typedef void(* YGyroValueCallback) (YGyro *func, const string &functionValue) |
Definition at line 236 of file yocto_gyro.h.
Definition at line 56 of file yocto_gyro.h.
| typedef void(* YQtValueCallback) (YQt *func, const string &functionValue) |
Definition at line 54 of file yocto_gyro.h.
| typedef void(* YQuatCallback) (YGyro *yGyro, double w, double x, double y, double z) |
Definition at line 245 of file yocto_gyro.h.
Function Documentation
|
inline |
Retrieves a gyroscope for a given identifier. The identifier can be specified using several formats:
- FunctionLogicalName
- ModuleSerialNumber.FunctionIdentifier
- ModuleSerialNumber.FunctionLogicalName
- ModuleLogicalName.FunctionIdentifier
- ModuleLogicalName.FunctionLogicalName
This function does not require that the gyroscope is online at the time it is invoked. The returned object is nevertheless valid. Use the method YGyro.isOnline() to test if the gyroscope is indeed online at a given time. In case of ambiguity when looking for a gyroscope by logical name, no error is notified: the first instance found is returned. The search is performed first by hardware name, then by logical name.
If a call to this object's is_online() method returns FALSE although you are certain that the matching device is plugged, make sure that you did call registerHub() at application initialization time.
- Parameters
-
func : a string that uniquely characterizes the gyroscope
- Returns
- a YGyro object allowing you to drive the gyroscope.
Definition at line 625 of file yocto_gyro.h.
|
inline |
Retrieves a quaternion component for a given identifier. The identifier can be specified using several formats:
- FunctionLogicalName
- ModuleSerialNumber.FunctionIdentifier
- ModuleSerialNumber.FunctionLogicalName
- ModuleLogicalName.FunctionIdentifier
- ModuleLogicalName.FunctionLogicalName
This function does not require that the quaternion component is online at the time it is invoked. The returned object is nevertheless valid. Use the method YQt.isOnline() to test if the quaternion component is indeed online at a given time. In case of ambiguity when looking for a quaternion component by logical name, no error is notified: the first instance found is returned. The search is performed first by hardware name, then by logical name.
If a call to this object's is_online() method returns FALSE although you are certain that the matching device is plugged, make sure that you did call registerHub() at application initialization time.
- Parameters
-
func : a string that uniquely characterizes the quaternion component
- Returns
- a YQt object allowing you to drive the quaternion component.
Definition at line 213 of file yocto_gyro.h.
|
inline |
Starts the enumeration of gyroscopes currently accessible. Use the method YGyro.nextGyro() to iterate on next gyroscopes.
- Returns
- a pointer to a YGyro object, corresponding to the first gyro currently online, or a NULL pointer if there are none.
Definition at line 636 of file yocto_gyro.h.
|
inline |
Starts the enumeration of quaternion components currently accessible. Use the method YQt.nextQt() to iterate on next quaternion components.
- Returns
- a pointer to a YQt object, corresponding to the first quaternion component currently online, or a NULL pointer if there are none.
Definition at line 224 of file yocto_gyro.h.